A flexible pipeline for video/audio acquisition, encoding, decoding, and output using FFmpeg on ROS 2
ffmpeg_pipeline is a collection of ROS 2 packages designed to efficiently and flexibly integrate the powerful and stable multimedia capabilities of FFmpeg into robotic systems. Using ffmpeg_pipeline, the following types of applications can be constructed solely through configuration files, without writing custom ROS 2 nodes:
- Read an H.264 stream from a USB camera on a robot and transmit it to the operator’s PC via a ROS 2 topic, without CPU-intensive and time-consuming re-encoding by the camera driver or
image_transport. The operator PC decodes and displays the video with low latency using hardware acceleration. - Read an audio stream from a microphone on the operator's PC, compress it using the high-quality Opus codec, and transmit it to the robot via a ROS 2 topic. The robot decodes it with low-latency settings and plays it through a speaker.
- Apply desired resolution/sample rate/format conversions to various input sources supported by FFmpeg (e.g., video/audio files, network cameras, desktop screens), compress them using the desired codec, and distribute them using the desired protocol.
To enable such flexible audio/video processing pipelines, ffmpeg_pipeline implements FFmpeg components—such as input, output, encoder, decoder, scaler, and resampler—as ros2_control hardware and controller plugins. This architecture provides users with the following benefits:
- Access to almost all FFmpeg functionalities using standard ROS 2 launch and parameter frameworks.
- Flexible composition of input/output and pre/post-processing (encoding/decoding/conversion) by combining desired hardware and controller plugins.
- Controllers are chainable, allowing complex pipelines with multiple processing stages to be built from modular, single-function controllers.
- Data is exchanged between hardware and controllers via pointers on
hardware_interface, enabling efficient processing with minimal overhead. - Transmitting processed data through ROS 2 topics enables seamless system integration across multiple processes or machines.
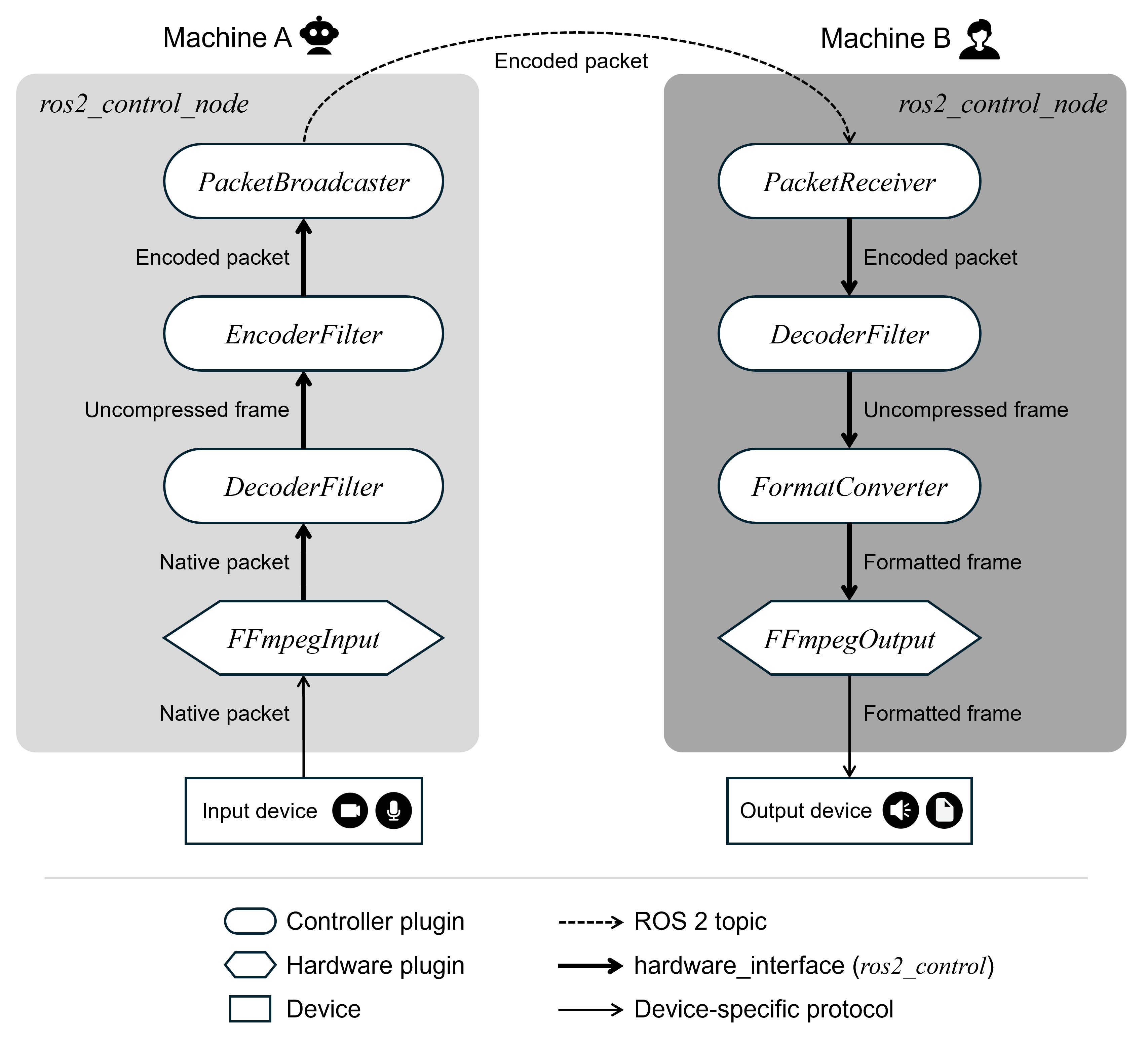 Fig. example of distributed audio/video pipeline using
Fig. example of distributed audio/video pipeline using ffmpeg_pipeline
This repository contains the following packages:
ffmpeg_controllers: Chainableros2_control-compatible controllers for encoding, decoding, and filtering audio/video streams.ffmpeg_cpp: C++17 wrapper for the FFmpeg C library.ffmpeg_hardware:ros2_control-compatible hardware drivers backed by FFmpeg input/output.ffmpeg_image_transport:image_transportplugins using FFmpeg for image encoding and decoding.ffmpeg_pipeline: A metapackage that groups related packages for building FFmpeg-based pipelines.ffmpeg_pipeline_examples: Practical examples of various pipeline configurations.ffmpeg_pipeline_msgs: Message definitions for transferring audio and video data.
ROS 2 Jazzy on Ubuntu 24.04 LTS
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
git clone <this repository URL>
rosdep install --from-paths . --ignore-src --rosdistro jazzy -y
cd ~/ros2_ws
colcon build
source install/setup.bashSee ffmpeg_hardware for details.
- FFmpegInput: Reads audio/video packets from various devices supported by
libavformatandlibavdevice(e.g., V4L2 or network cameras, PulseAudio inputs, local files, screen capture, etc.).
-
FFmpegOutput: Writes audio/video packets and frames to various devices supported by
libavformatandlibavdevice(e.g., PulseAudio outputs, local files, etc.). -
DumpInfoOutput: Dumps packet and frame information from controllers for debugging and visualization.
See ffmpeg_controllers for details.
Filters retrieve data from hardware or other controllers and export processed results via their own state interfaces.
-
EncoderFilter: Compresses frames into various formats using
libavcodec(e.g., H.264, MJPEG, Opus, and over 100 other codecs). -
ParserFilter: Parses packets using
libavcodecto extract codec parameters for downstream controllers. -
DecoderFilter: Decompresses packets in various formats using
libavcodec. -
VideoConverterFilter: Converts resolutions and pixel formats using
libswscale. -
AudioConverterFilter: Converts sample rates, channel layouts, and formats using
libswresample. -
AudioFifoFilter: Adjusts the number of samples per audio frame using
libavutil.
Broadcasters retrieve data from hardware or other controllers and publish it as ROS 2 messages.
-
PacketBroadcaster: Publishes compressed audio/video packets.
-
FrameBroadcaster: Publishes uncompressed audio/video frames.
-
ImageBroadcaster: Publishes video frames as
sensor_msgs::msg::Image. -
CompressedImageBroadcaster: Publishes video packets as
sensor_msgs::msg::CompressedImage.
Receivers subscribe to ROS 2 messages and export them via their own state interfaces.
-
PacketReceiver: Subscribes to compressed packets and injects them into the pipeline.
-
FrameReceiver: Subscribes to uncompressed frames and injects them into the pipeline.
See ffmpeg_image_transport for details.
-
ffmpeg_sub: Subscribes to
sensor_msgs::msg::CompressedImageon the~/image/ffmpegtopic and decompresses messages usinglibavcodec. -
ffmpeg_pub: Compresses images using
libavcodecand publishes them to the~/image/ffmpegtopic as asensor_msgs::msg::CompressedImage.
Below are some example pipelines you can launch. For additional examples, see ffmpeg_pipeline_examples.
ros2 launch ffmpeg_pipeline_examples h264_camera_pipeline.launch.pyflowchart LR
A@{ shape: rect, label: "V4L2 camera" } -- "H.264 packet" --> B@{ shape: hex, label: "FFmpegInput (format:=#quot;v4l2#quot;)" }
subgraph ros2_control_node
B == "H.264 packet" ==> C@{ shape: stadium, label: "PacketBroadcaster" }
end
C -. "CompressedImage (format=#quot;h264#quot;)" .-> D@{ shape: stadium, label: "ffmpeg_sub (hw_type_name=#quot;cuda#quot;)" }
subgraph image_view
D
end
ros2 launch ffmpeg_pipeline_examples pulse_audio_capture_pipeline.launch.pyflowchart LR
A@{ shape: rect, label: "PulseAudio input" } -- "PCM packet" --> B@{ shape: hex, label: "FFmpegInput (format:=#quot;pulse#quot;)" }
subgraph ros2_control_node
B == "PCM packet" ==> C@{ shape: stadium, label: "DecoderFilter" }
B ==> C2@{ shape: stadium, label: "PacketBroadcaster" }
C == "PCM frame" ==> D@{ shape: stadium, label: "EncoderFilter (encoder_name:=#quot;libopus#quot;)" }
C ==> D2@{ shape: stadium, label: "FrameBroadcaster" }
D == "Opus packet" ==> E@{ shape: stadium, label: "PacketBroadcaster" }
end
C2 -. "Packet (codec=#quot;pcm_s16#quot;)" .-> F:::hidden
D2 -. "Frame (format=#quot;pcm_s16#quot;)" .-> G:::hidden
E -. "Packet (codec=#quot;opus#quot;)" .-> H:::hidden
classDef hidden display: none;
ros2 launch ffmpeg_pipeline_examples pulse_audio_play_pipeline.launch.pyflowchart LR
A:::hidden -. "Packet (codec=#quot;opus#quot;)" .-> B@{ shape: stadium, label: "PacketReceiver" }
subgraph ros2_control_node
B == "Opus packet" ==> C@{ shape: stadium, label: "DecoderFilter (decoder_name:=#quot;libopus#quot;)" }
C == "PCM frame" ==> D@{ shape: hex, label: "FFmpegOutput (format:=#quot;pulse#quot;)" }
end
D -- "PCM frame" --> H@{ shape: rect, label: "PulseAudio output" }
classDef hidden display: none;
ros2 launch ffmpeg_pipeline_examples pulse_audio_capture_pipeline.launch.py namespace:=capture
ros2 launch ffmpeg_pipeline_examples pulse_audio_play_pipeline.launch.py namespace:=play input_topic:=/capture/packet_broadcaster/packet