Use both compass heading and GPS CoG for navigation #6650
Description
Current Behavior
Currently if my understanding of the navigation code is good, either only the compass or only the gps course over ground is used, to know in which direction the model is moving.
Problem :
- The gps can't be used if the wind speed is close to the plane's flight speed.
- The compass only takes into account the direction in which the model is pointing, not the direction in which it is moving, so rth is less efficient with a compass than with a gps.
Desired Behavior
Use both orientation given by the compass and the orientation given by the gps by mixing them according to the ground speed.
Suggested Solution
A function that can be activated, to mix the orientation given by the compass and the orientation given by the gps according to the ground speed.
At low speed: only the compass is used, and then the higher the speed, the more the orientation given by the gps is used
See this picture for more clarity :
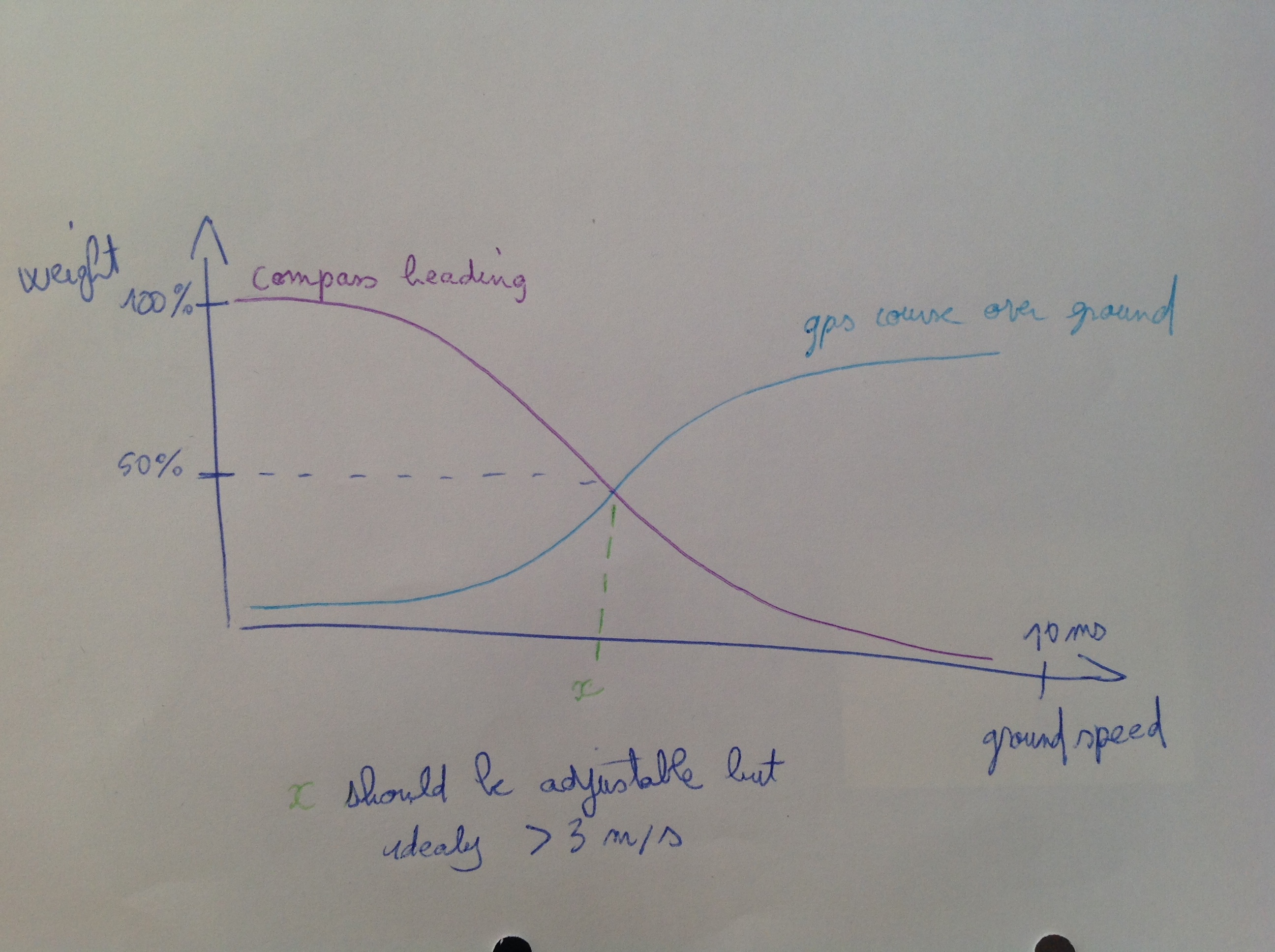
Function exclusion :
- if the ground speed is lower than "x" (see picture) and the difference between compass and gps course over ground > 90, use only the compass
- if the ground speed is higher than "x" (see picture) and the difference between compass and gps course over ground > 90, use only gps
Who does this impact? Who is this for?
All users using navigations modes (RTH, Waypoint..etc)