Like all good cartoons, this library brings together two good stories:
- DroneKit Python offering easy Python interfacing to a MAVlink-controlled drone
- py_trees implementing behaviour trees in Python
The work was inspired by Increasing Modularity of UAV Control Systems using Computer Game Behavior Trees by Petter Ogren, and follows on from our experience using behaviour trees in the Venturer driverless car project at BRL. Behaviour trees make it really easy to mess around with mission scripting in a modular way. If you need to insert some extra checking or stages in an operation, you can do so without touching the parts you've made already.
drone_trees is compatible with python 3.7 and it needs the following dependencies:
dronekit-pythonversion 2.9.1 or higherpy-treesversion 2.0.0 or higher- Optional
pyttsx3V2.87 for voice feedback. If using windowspypiwin32is also needed.
To install:
- On Linux,
pip install py_trees dronekit dronekit_sitl(recommended in a virtual environment) and then local install of drone_trees usingpip install -e .in the root folder of this repository. - On Windows, in the root folder of this repository,
conda env create drone_trees.ymlfollowed byconda develop .
This example uses a hand-crafted behaviour tree to control a drone in GUIDED mode through a simple flight round a square.
To simulate the whole thing automatically, run the test_square.py script. To see more, connect your favourite ground station software to the extra port on the SITL, usually tcp:127.0.0.1:5762 but check the output as the port number increments by ten each run.
If you'd rather manage the sim yourself or even fly the thing (!), run python fly_square.py <conn> where <conn> is the connection to the mavlink stream. For example, if you run a SITL through Mission Planner, hit Ctrl+F, then the Mavlink button, and enable 'TCP host' with write access. Then, if you agreed to the defaults, run python fly_square.py tcp:127.0.0.1:14550. You'll need to put the drone in 'GUIDED' and arm it through the ground station as the behaviour tree will never arm or change mode.

This example is based on the CASCADE BRIDGE case study. Use the test_bridge.py script to run it all automatically, or use python fly_bridge.py <conn> as described above to connect to a drone, ground control software or simulator.
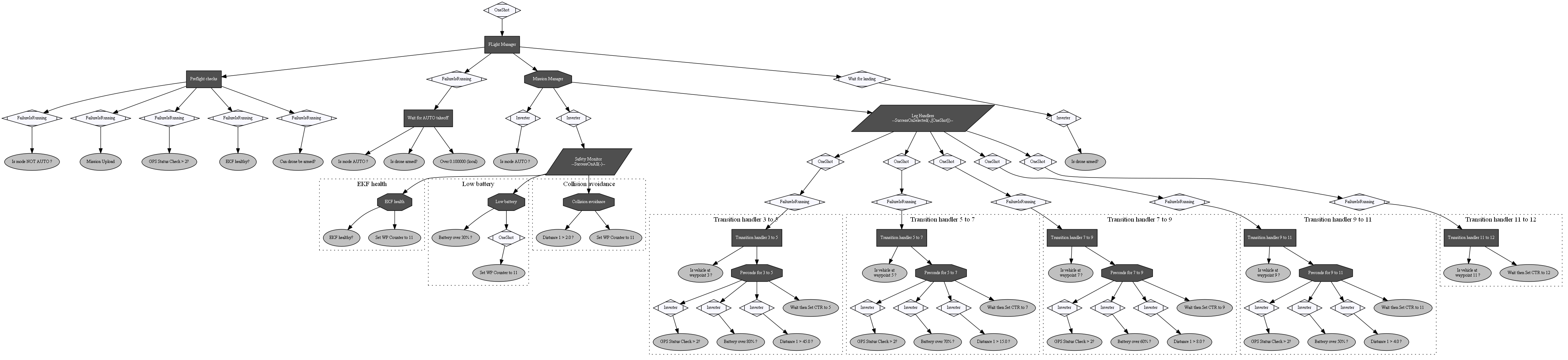
This example uses the 'flight_idioms' tools to construct a behaviour tree in a standard form, avoiding the need for the user to work directly with the py_trees library. The drone performs an extensive pre-flight, then waits for the pilot to arm it, put it in AUTO mode and initiate take-off by throttling up. (These latter three activities are automated in the test_bridge.py script.) Then for the rest of the mission:
-
the drone will instantly return home, via a SAFTI point 50m from the bridge, if the battery drops below 30% or the EKF goes unhealthy at any time
-
each mission phase depends on a specific battery level