How to Directly Drive x.27 or x.40 Stepper Motors
For this tutorial, you need the following components
- MobiFlight Connector
- MobiFlight Compatible Arduino with the newest MobiFlight Firmware
- x27 Stepper (Singleshaft) and/or x40 (DoubleShaft) Stepper
- Soldering Iron, Soldering tin, wires
Connect the wires to consecutive pins in your Arduino:

Go to "MobiFlight Modules"
Add a new device (Stepper Motor), then configure the pins, so that Pin 2 and Pin 3 are swapped:

It is important to have these two pins swapped otherwise the stepper will just buzz around angrily.
Under "Output" create a row, and name it what you'd like. Don't forget to check the active box.
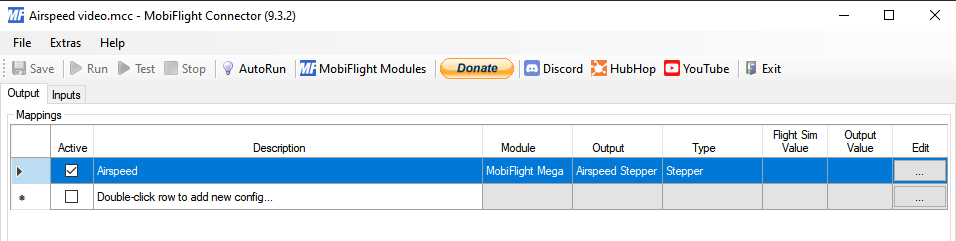
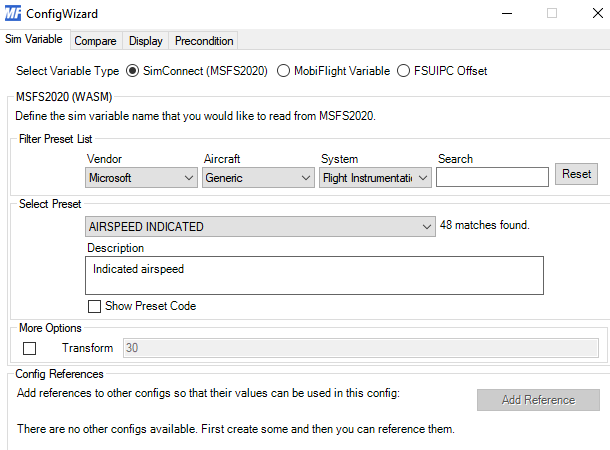
Configure the stepper to whatever you'd like.
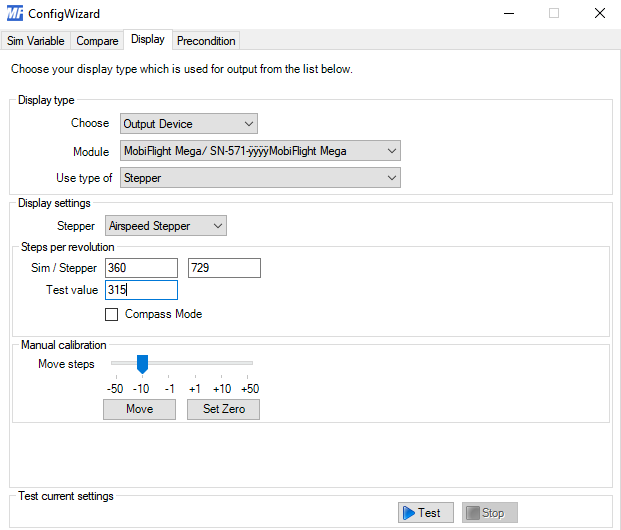
Under display, choose your stepper and insert your sim/stepper value. For me I found moving the stepper 729 steps gives 360 degrees of motion. The stepper has 315 degrees maximum so I set this as the test value.
This was written by Captain Bob with help from Discord Members @Ralf (elral66), @Tuomas Kuosmanen (tigertfly), @Jaime Leon and @John Toroid Thank you so much for helping me get it to work!
- MobiFlight Connector Installation
- Mobiflight Connector BETA version installation
- Modules
- MobiFlight Connector Files Structure
- MobiFlight Connector Uninstall
- Modules Reset to factory default
- Verifying the WASM module installation and locating the MSFS2020 community folder
- Using a Winwing FCU with MobiFlight
- Providing logs from MobiFlight
- MobiFlight Connector How does it work
- Mobiflight Connector Main Window
- Flash module with MobiFlight firmware
- Input and Output devices
- Joysticks
- Midi Boards
- Sim Variables (for Output)
- Input Actions
- Merging configuration files
- Disabling specific COM ports
- Examples Output LEDs
- Examples Input Switch
- Example 7 segment display
- Example Servo motor
- Controlling LEDs with an output shift register
- Adding lots of buttons with an input shift register
- Beginner's guide to input multiplexers
- Key Matrix with standard MobiFlight and Multiplexers
- Tutorial Easy Driver and x.27 or x.40 Stepper Motor
- Tutorial for Airbus VS display via 7-Segment LED Module
- Example Analog Input Potentiometer
- Baron G58 Tutorial Gear, Flaps, Mags, ELT Input Output Programming
- Using Mobiflight to control arduino-based 3rd party panels (RealSimGear GNS530)
- How to use a VNH2SP30 DC motor shield with MobiFlight
- Using 3D printer mainboards
- Playing sounds by sending keystrokes to AutoHotKey
- Using the selector knob on a Honeycomb Bravo
- Using an adjustable 12 position switch as a GA starter
- Brightness of LCD displays with I2C
- Using three-position switches
- Transponder with one Rotary
- MSFS2020 RPN Tips and Tricks
- MSFS2020 Using the Custom Input Code Box
- MSFS2020 Install WASM module and Event List
- MSFS2020 How to Create and Use User Defined Lvars
- MSFS2020 How to Create a Blinking LED configuration
- MSFS2020 User Defined WASM Module Events Best Practices
- MSFS2020 Developer Mode, Model Behavior dialog and Console window
- MSFS2020 PMDG 737‐700 List of Events that require use of FSUIPC7
-
MSFS2020 PMDG 737‐700 Calibrate throttle idle and reverse thrust using interpolation (Valkyrie)
- MSFS2020 PMDG 737-700 Chrono unit functions implemented in Mobiflight
- Configuring PMDG 737 Parking Brake Lever Auto-Release with a Servo in Mobiflight
- Using encoder to drive a value back and forth within a given range
- Adding a custom board to MobiFlight
- User guide - Community Board and Custom Devices
- Developing your own custom devices/boards