Control System
This page details: 1) motor's electrical wiring, 2) speed signaling, 3) turning and steering, 4) user input (joystick, microcontroller, etc), 5) spatial navigation, and related topics.
Here are TODOs (some done, some pending):
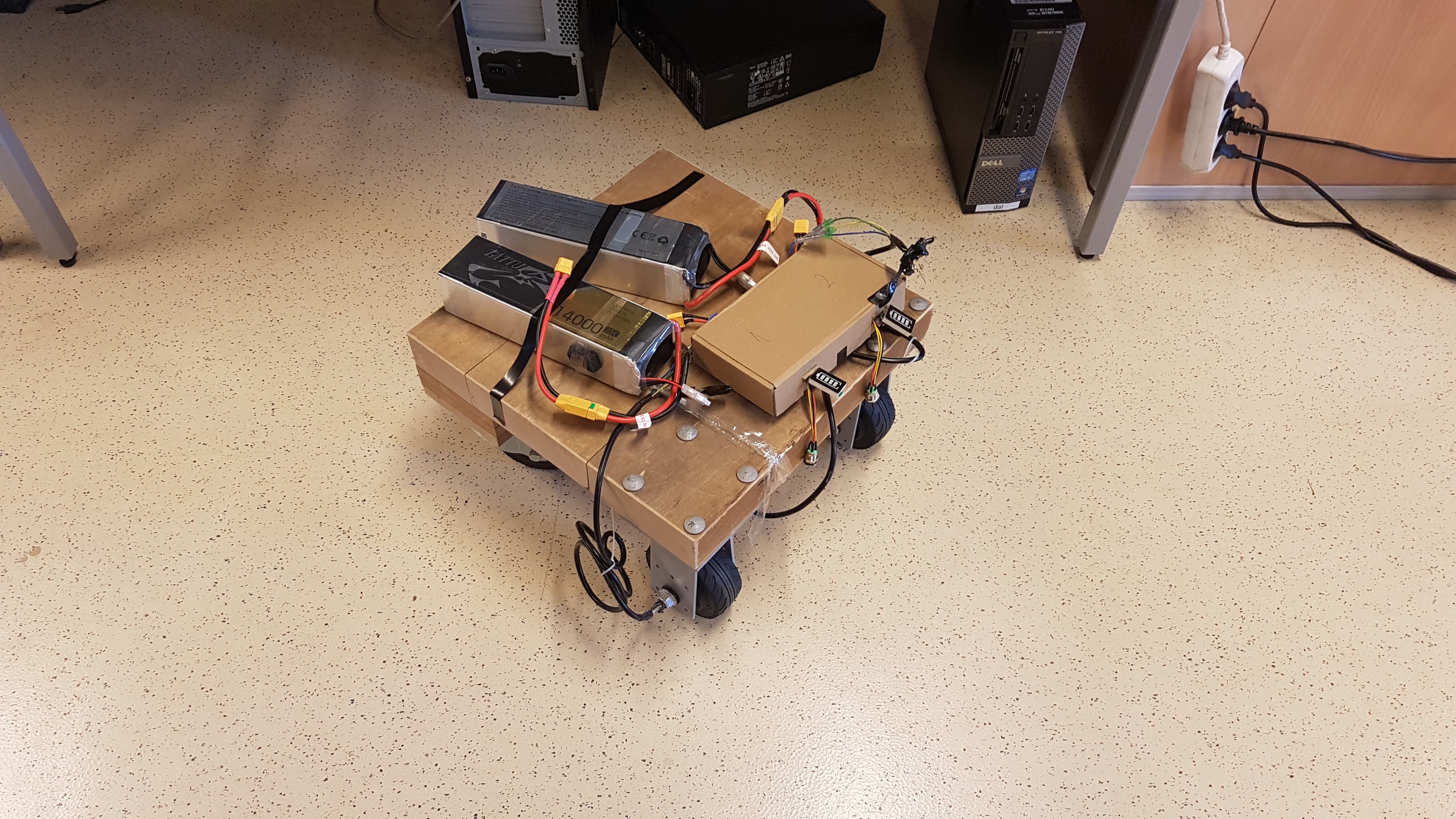
It was easy to hook batteries up to the ESCs, use the included controllers, and go!
We could even ride it. (TODO upload the video and link here)

Use RC Remote or Arduino to control ESC.
This is because we need to know the most important details of controlling the hub motors. In the future one might want the possibility of controlling from any user input (phone, computer, rc remote, etc).
Do the math. How does input values (e.g. joystick) translate to 2 wheels capable of different speeds and directions?
Thoughts:
For a 2D input of ix,iy ∈ [-1.0, 1.0] | x²+y²<1 how do we map it to ol,or ∈ [-1.0, 1.0]?
f(-1, 0) ?= [ -1, 1]
f( 0, 1) ?= [ 1, 1]
f( 0.71, 0.71) ?= [ 0.5, 1]
And how do we best make these parameters tweakable to ones taste?
Slam a bunch 'o sensors around all sides and detect when you hit a wall.
This is a first step in making a fun autonomous vehicle!
It was tested and it worked, but we had no time to implement it.
How to represent and on-the-go build a map of a room?
The vehicle could know (by collision detection, user commands, etc) where walls are (or other obstructions).
Given a start vector x₀ and a stopping pointx₁ (plus stopping point xₙ and so on), how do you reconcile that into a coherent map?