{kind=link}
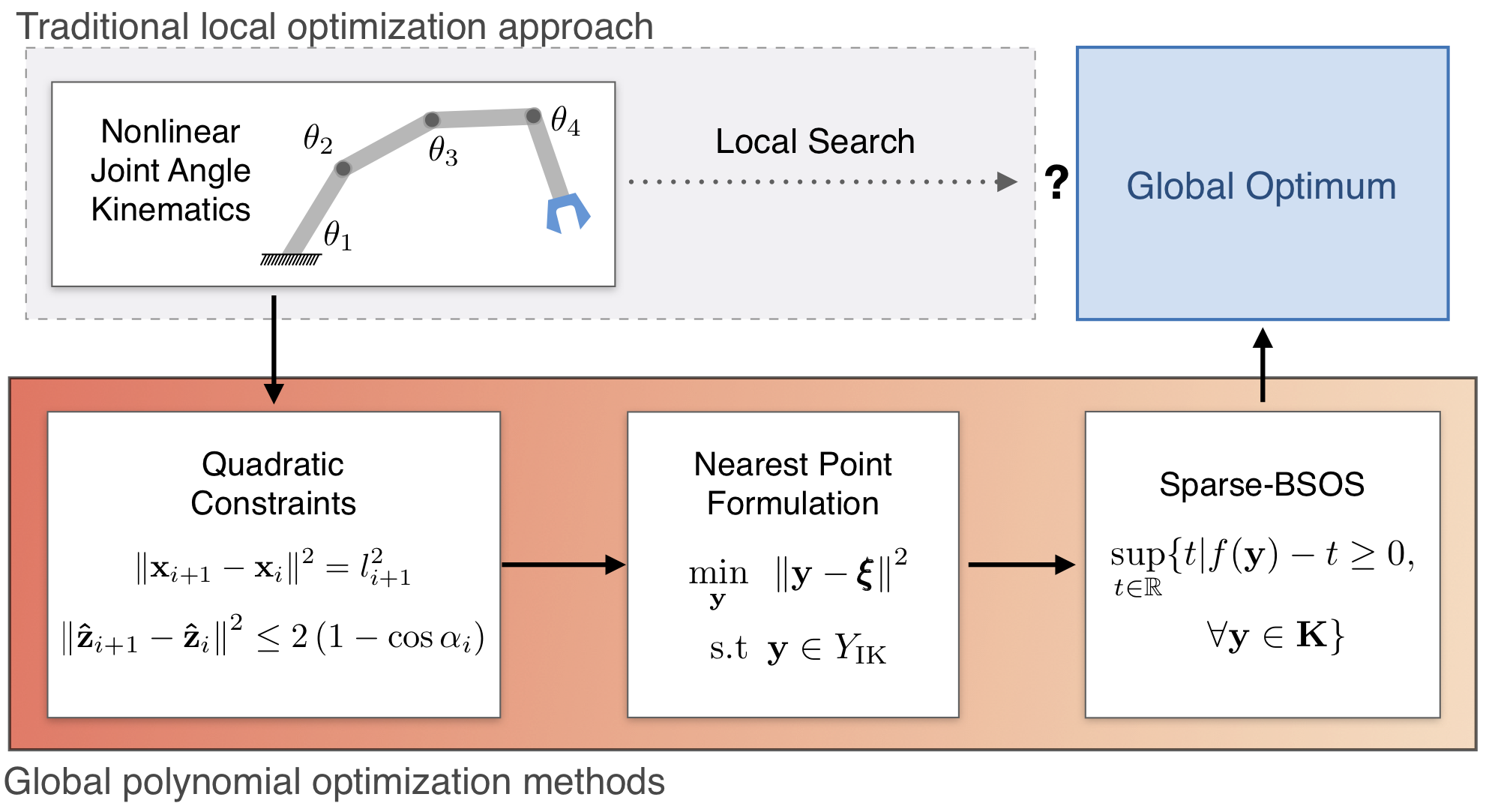
Inverse kinematics using sum of squares optimization.
All code and experiments were developed and run in MATLAB R2018b.
We use the Sparse-BSOS MATLAB package, which ships with its own modified version of SDPT3. In order to use our package, you must replace the version of the file sdpt3.m found in that package with the one in this repository. You must also replace certificates/auxfun/csol.m with the version of csol.m found in this respository. Both of these files are in the replacement_files/ directory.
The scripts examples/ik_solution_extraction_experiment_2d.m and examples/ik_solution_extraction_experiment_2d.m demonstrate usage of our main function utils/SBSOS/solveIKSBSOS.m on simulated 2D and 3D problem instances. The default settings of these scripts carry out experiments identical to those in our paper (see citation below).
If you use any of this code in your work, please cite the relevant publication:
@article{maric2019inverse,
title={Inverse Kinematics for Serial Kinematic Chains via Sum of Squares Optimization},
author={Maric, Filip and Giamou, Matthew and Khoubyarian, Soroush and Petrovic, Ivan and Kelly, Jonathan},
journal={arXiv preprint arXiv:1909.09318},
year={2019}
}