{kind=link}
{kind=link}
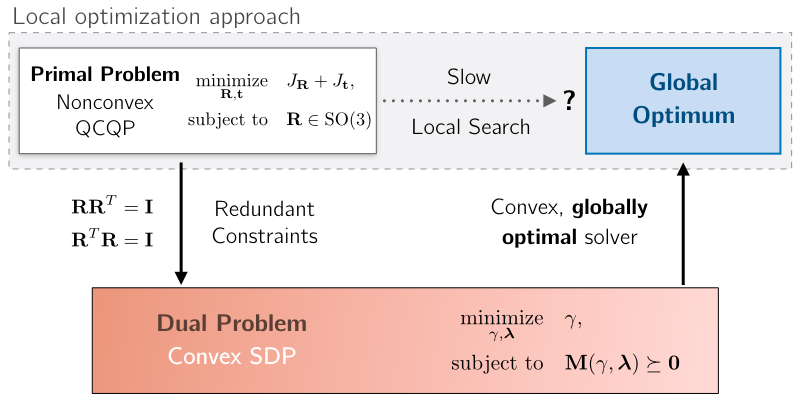
Certifiably globally optimal extrinsic calibration for sensors providing egomotion estimates.
See the matlab/ directory for instructions on how to run the algorithm from our 2019 IEEE RA-L publication. The data/ directory contains files with experimental results from our paper.
See the python/extrinsic_calibration directory for instructions on how to run the algorithm from our IEEE MFI 2020 publication.
If you use this work in your research, please cite the following papers:
@article{2019_Giamou_Certifiably,
doi = {10.1109/LRA.2018.2890444},
journal = {{IEEE} Robotics and Automation Letters},
month = {April},
number = {2},
pages = {367--374},
title = {Certifiably Globally Optimal Extrinsic Calibration from Per-Sensor Egomotion},
url = {https://arxiv.org/abs/1809.03554},
volume = {4},
year = {2019}
}
@inproceedings{2020_Wise_Certifiably,
address = {Karlsruhe, Germany},
author = {Emmett Wise and Matthew Giamou and Soroush Khoubyarian and Abhinav Grover and Jonathan Kelly},
booktitle = {Proceedings of the {IEEE} International Conference on Multisensor Fusion and Integration {(MFI)}},
doi = {10.1109/MFI49285.2020.9235219},
title = {Certifiably Optimal Monocular Hand-Eye Calibration},
url = {https://arxiv.org/abs/2005.08298},
year = {2020}
}