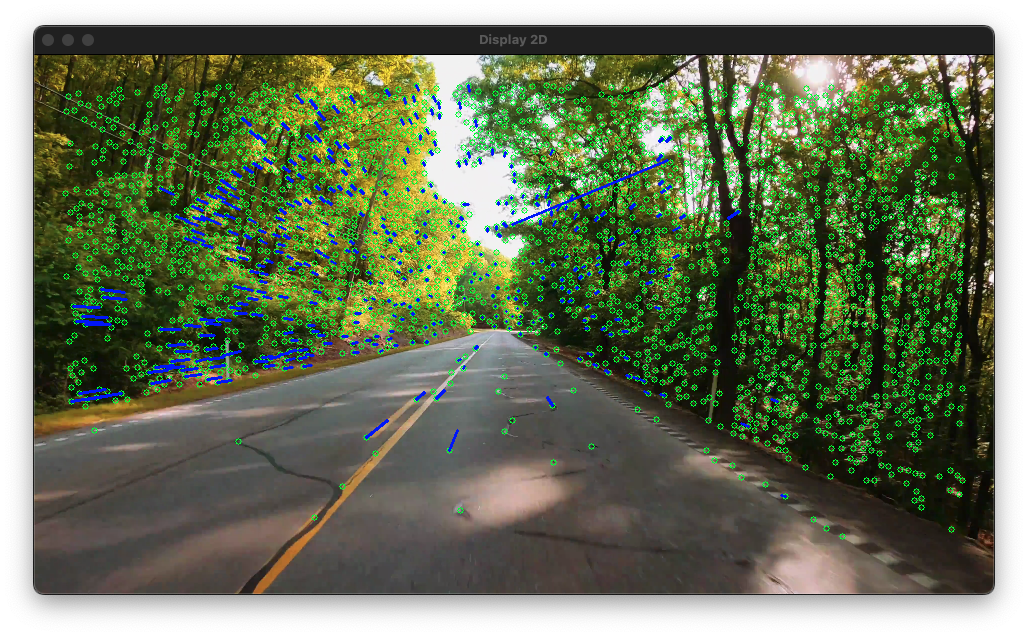
A toy SLAM implmenetation in python.
Heavily inspired by geohot's twitchslam
pip3 install -r requirements.txt
python3 PySLAM/slam.py./slam.py data/country-road-driving.mp4
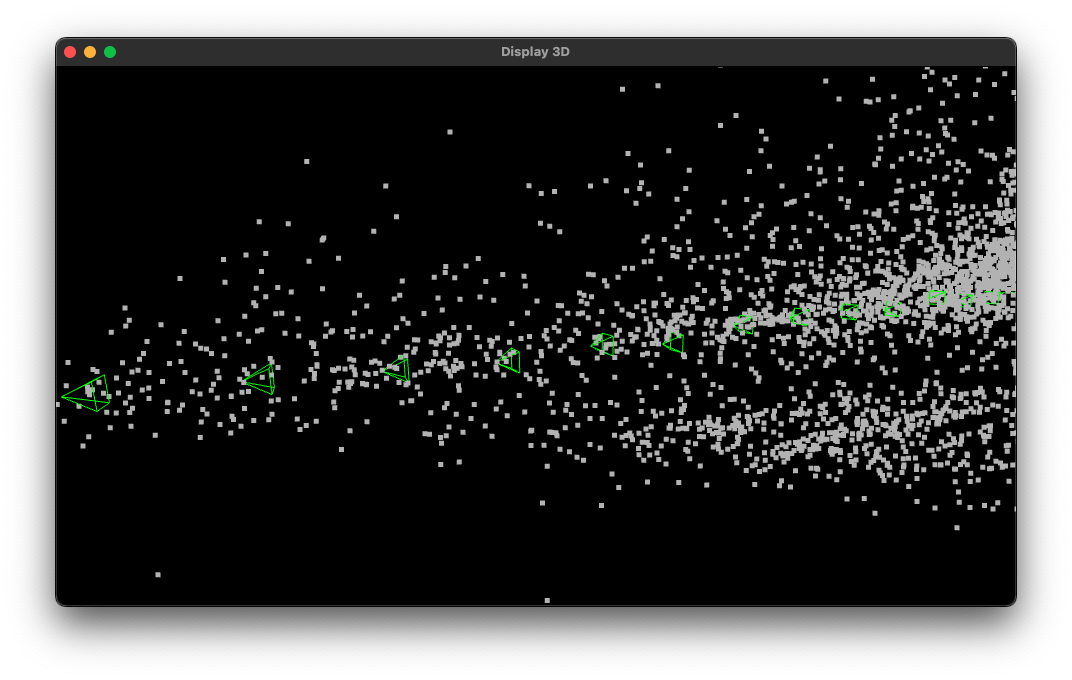
- 3D points are wrong when it comes to actual shapes (check freiburgdesk example)
- Use matches to avoid duplicate 3D points
- Bundle Adjustment (DONE)
- Loop Closure
- Pose Graph Optmiziation