Unable to make it work with turtlebot and rtabmap #5
Comments
|
Hi Bruce,
Firstly, thank you very much for the interest.
Secondly, yes, the system is a headache to properly fix all the parameters.
That is one of the drawbacks of the system.
Currently, I am using the system with Rtabmap with good results. The
problem is that there are a lot of parameters that must be fixed regarding
the density of the input point cloud map (cloud_map of Rtabmap in this
case).
My advice is that you should play first with all the filters' parameters
that are launched by pcl_filters.launch. Take a look at the package and the
configuration files .yaml that are launched.
One instance of the node is launched to crop the cloud_map in a local area
of the robot and downsample it by means of a voxel grid to use the
resulting points as sampling space for the RRT* planner. Another node
instance is employed to evaluate the transversability of the possible robot
locations (try not to remove a lot of points if the input point cloud is
not very dense). Another is used for exploration, and another for the local
planner.
All of them use the cloud_map as an input source.
They are also publishing the filtered point clouds that are producing. You
can visualize them in RViz, and use that information to try to fix the
parameters accordingly.
You can also play with some configuration parameters in
navigation_params.yaml (adapted_move_base package).
In the section navigation_features_3d, indicate the correct robot radius
(robot_circuns_radius), and try to play with the parameter
min_points_allowed. It determines the minimum number of points that can be
contained in the sphere of radius robot_circuns_radius in order to
determine if the position can be evaluated or must be discarded because
there is not enough information (points).
I hope this information can help you. Let me know if you are making any
progress and do not hesitate to make any other questions.
Regards!
Noé
El mié., 3 jun. 2020 a las 11:44, BruceCanovas (<notifications@github.com>)
escribió:
… Hi,
I am currently trying to use your navigation system with a gazebo
simulated turtlebot. I use rtabmap_ros to build the point cloud map but I
am facing some issues.
I managed to build your system and launch the 3 different launch files.
However I had to remove "set (CMAKE_BUILD_TYPE Debug)" and put "set
(CMAKE_BUILD_TYPE Release)" instead in the CMakeLists.txt file of
rrt_planners, otherwise it was crashing at runtime. It seems to be related
to Boost issue and may onlyconcerned to my configuration.
I followed the configuration guidelines you gave, replacing odom and
base_footprint frame of the turtlebot where they are needed, as well as
camera_depth_optical_frame frame and odom topic, but even after that I am
unable to make it work properly. I edited the file "control_tester.py" too,
replacing "g.header.frame_id = 'indires_rover/odom'" by "g.header.frame_id
= 'odom'". I am able to send correct goals but the planner always generates
really weird trees and the robot never reaches the goal. Instead of going
to the waypoint I sent, it goes back home sometimes.
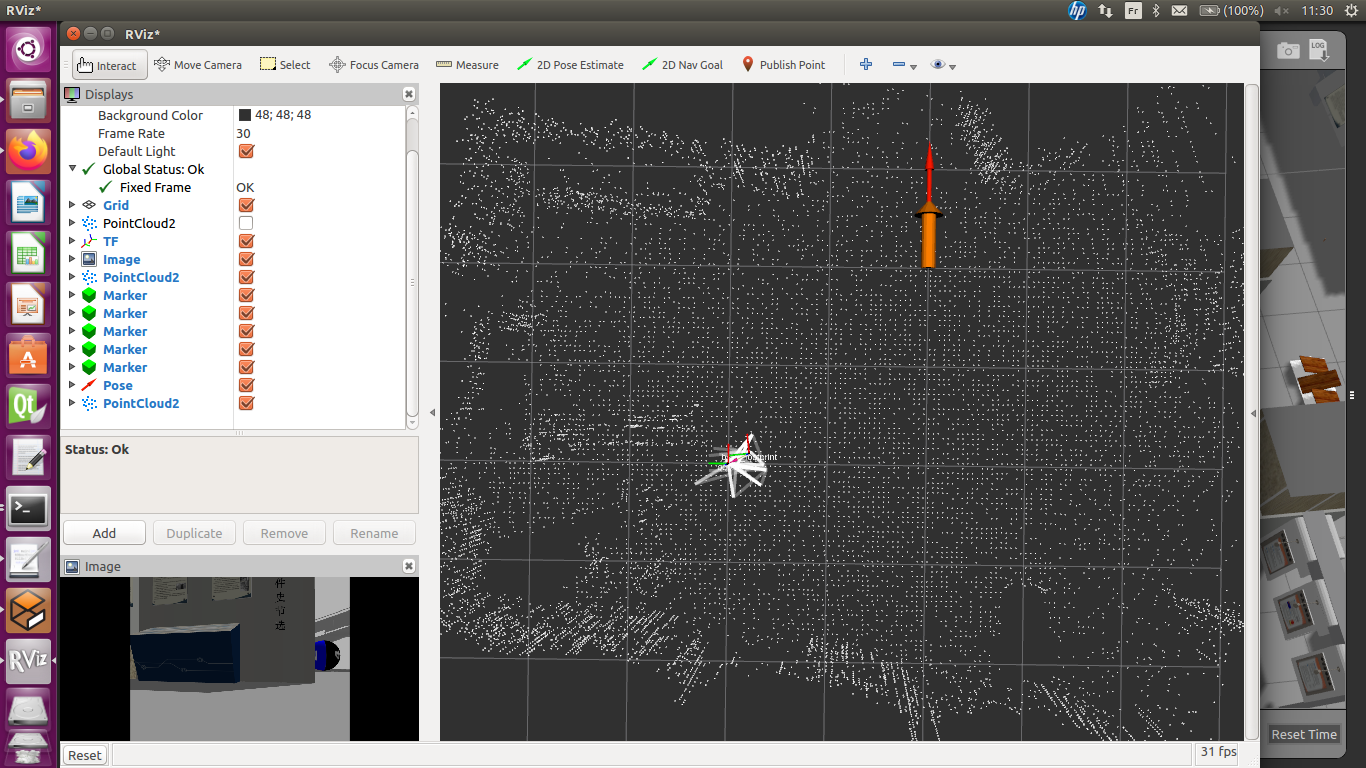
Here are some screenshots of generated rrt trees when trying to go to
position (2, -2, 0) in odom frame.
[image: Capture du 2020-06-03 11-30-24]
<https://user-images.githubusercontent.com/36501479/83620969-5ea48200-a58e-11ea-8e78-c5a43bad66ac.png>
[image: Capture du 2020-06-03 10-40-21]
<https://user-images.githubusercontent.com/36501479/83620824-2a30c600-a58e-11ea-97cc-efb6da80927f.png>
I would like to know if you managed to make it work successfully with
rtabmap or if you have any clue about what happens in my case.
Thank you for your great work!
—
You are receiving this because you are subscribed to this thread.
Reply to this email directly, view it on GitHub
<#5>, or unsubscribe
<https://github.com/notifications/unsubscribe-auth/ADUK36DBF2G24OKRE7EYOSDRUYLQBANCNFSM4NRQAK6A>
.
--
NOE PEREZ HIGUERAS
Postdoctoral Researcher - RoboticsLab
Dept. Ingenieria de Sist. y Automatica
Universidad Carlos III de Madrid
c/ Butarque, 15 28911 Leganes, Madrid
España - SPAIN
|
{kind=link}
{kind=link}
|
Hi Noé, Thank you for your answer and advices. I finally solved my issue and after a lot of debugging I found out that the strange behaviour was due to a problem in the function RRT::Steering::simple3dSteer(). |
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
Hi,
I am currently trying to use your navigation system with a gazebo simulated turtlebot. I use rtabmap_ros to build the point cloud map but I am facing some issues.
I managed to build your system and launch the 3 different launch files. However I had to remove "set (CMAKE_BUILD_TYPE Debug)" and put "set (CMAKE_BUILD_TYPE Release)" instead in the CMakeLists.txt file of rrt_planners, otherwise it was crashing at runtime. It seems to be related to Boost issue and may only concern my configuration.
I followed the configuration guidelines you gave, replacing odom and base_footprint frame of the turtlebot where they are needed, as well as camera_depth_optical_frame frame and odom topic, but even after that I am unable to make it work properly. I edited the file "control_tester.py" too, replacing "g.header.frame_id = 'indires_rover/odom'" by "g.header.frame_id = 'odom'". I am able to send correct goals but the planner always generates really weird trees and the robot never reaches the goal. Instead of going to the waypoint I sent, it goes back home sometimes.
Here are some screenshots of generated rrt trees when trying to go to position (2, -2, 0) in odom frame.

I would like to know if you managed to make it work successfully with rtabmap or if you have any clue about what happens in my case.
Thank you for your great work!
The text was updated successfully, but these errors were encountered: