| ⚠ This project is deprecated and isn't maintained. |
|---|
Computer Vision (POVa)
Faculty of Information Technology (FIT)
Brno University of Technology (BUT)
We have implemented a computer vision system intended for tracking pedestrians in observed scene. Our system is capable of detecting people in images from two cameras. Detected bodies are then matched together based on similarities in their histograms to make a pair of images of the same person. Detected person is then located in 3D space using triangulation, which uses depth planes in 3D space and their intersection. Located frames of people are then tracked to form path in space over time.
Team in alphabetical order: Lukáš Petrovič @flaxh, Filip Šťastný @xstast24, Martin Vondráček @mvondracek,
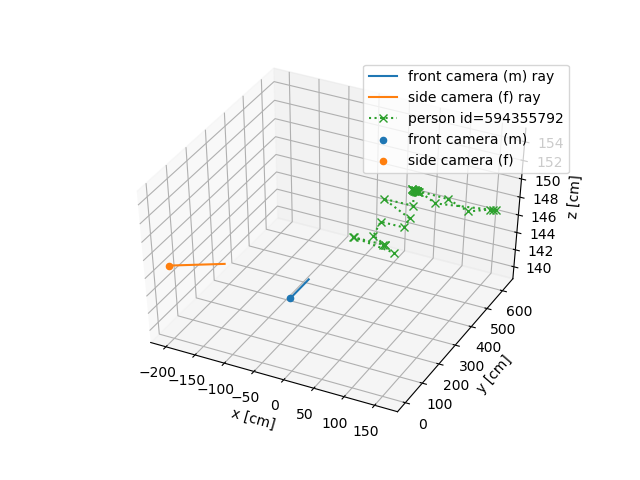
Path visualisation of the tracked person (green) in an observed scene
 Scene observed by two cameras (left) and the result of pedestrian tracking (right)
Scene observed by two cameras (left) and the result of pedestrian tracking (right)
 Person detection
Person detection
- Python 3.7 is required.
- Please create a virtual environment for this project.
- With activated virtual environment, run:
pip install -r requirements.txtin the project folder. - Prepare selected person detection backend — one from the following:
- Download OpenPose GPU binaries.
and extract them to
openpose. Runopenpose/openpose-1.4.0-win64-gpu-binaries/models/getModels.bat. - or download OpenPose CPU binaries
and extract them to
openpose. Runopenpose/openpose-1.4.0-win64-cpu-binaries/models/getModels.bat. - or download just OpenPose model
and save it to
openpose/pose/coco.
- Download OpenPose GPU binaries.
and extract them to
- Select detector used in
main.pyaccording to your detection backend from previous step.OpenPoseBinaryDetectorif you use GPU or CPU binaries.OpenPoseDetectorif you have downloaded just OpenPose model.
- Please download testing data from
https://github.com/mvondracek/VUT-FIT-POVa-2018-Pedestrian-Tracking
./main.py
- project report
- presentation slides (pptx with animations, pdf)
- supplemental materials