You signed in with another tab or window. Reload to refresh your session.You signed out in another tab or window. Reload to refresh your session.You switched accounts on another tab or window. Reload to refresh your session.Dismiss alert
Is your feature request related to a problem? Please describe. We now have such a problem:
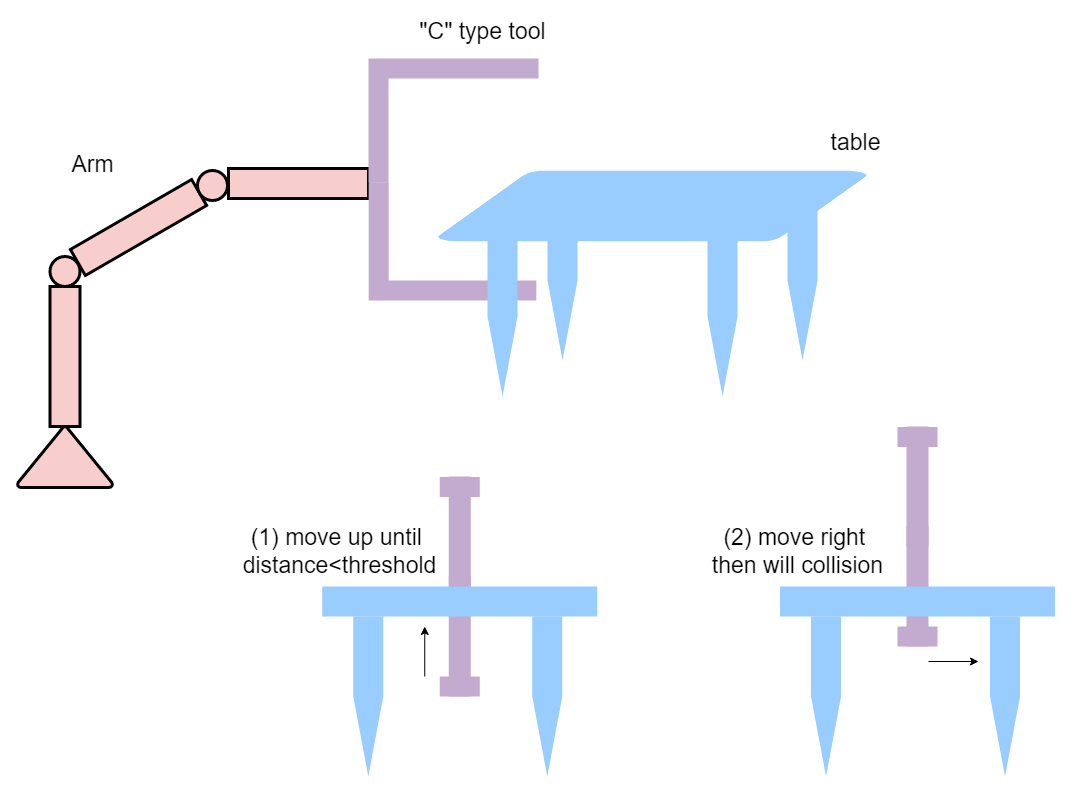
We want different components of the robot (eg: arm, C-type-tool, etc.) and different parts of the table (eg desktop, table legs, etc.) to maintain the set safe distance threshold;
We use ros fcl interface distance() to get the minimum distance from the robot to the table
manager.manager_->distance(object.collision_objects_[i].get(), &drd, &collision_detection::distanceCallback);
For the first time, when we try to move the C-type-tool up, we can control it to slow down and stop based on the minimum distance between the C-type-tool and the table;
When the C-type tool moves to the point where it is not allowed to continue upward movement, we try to move the tool to the right, and a collision occurs, because the obtained distance is always the minimum distance until the C-type-tool is closer to the table;
Describe the solution you'd like
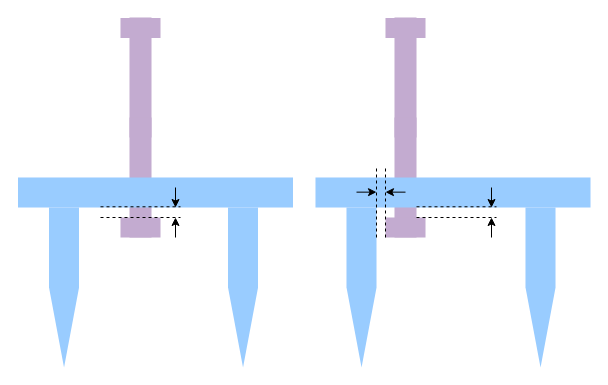
We want one concave polygon to move in all directions to another concave polygon, always staying outside the distance threshold we set, without collision
The equidistant collision model is not applicable because we set different distance thresholds and we cannot create an equidistant collision model for each distance threshold
Describe alternatives you've considered
A clear and concise description of any alternative solutions or features you've considered.
Additional context
The motion control of the object has a certain overshoot due to the large speed, so we need to be able to obtain the distance in all directions between a concave polyhedron and another concave polyhedron to control deceleration and stop
We're curious how such issues are addressed in the game
Looking forward to your reply and solution
Thanks!
The text was updated successfully, but these errors were encountered:
Is your feature request related to a problem? Please describe.
We now have such a problem:
We want different components of the robot (eg: arm, C-type-tool, etc.) and different parts of the table (eg desktop, table legs, etc.) to maintain the set safe distance threshold;
We use ros fcl interface distance() to get the minimum distance from the robot to the table
manager.manager_->distance(object.collision_objects_[i].get(), &drd, &collision_detection::distanceCallback);
For the first time, when we try to move the C-type-tool up, we can control it to slow down and stop based on the minimum distance between the C-type-tool and the table;
When the C-type tool moves to the point where it is not allowed to continue upward movement, we try to move the tool to the right, and a collision occurs, because the obtained distance is always the minimum distance until the C-type-tool is closer to the table;
Describe the solution you'd like
We want one concave polygon to move in all directions to another concave polygon, always staying outside the distance threshold we set, without collision
The equidistant collision model is not applicable because we set different distance thresholds and we cannot create an equidistant collision model for each distance threshold
Describe alternatives you've considered
A clear and concise description of any alternative solutions or features you've considered.
Additional context
The motion control of the object has a certain overshoot due to the large speed, so we need to be able to obtain the distance in all directions between a concave polyhedron and another concave polyhedron to control deceleration and stop
We're curious how such issues are addressed in the game
Looking forward to your reply and solution
Thanks!
The text was updated successfully, but these errors were encountered: