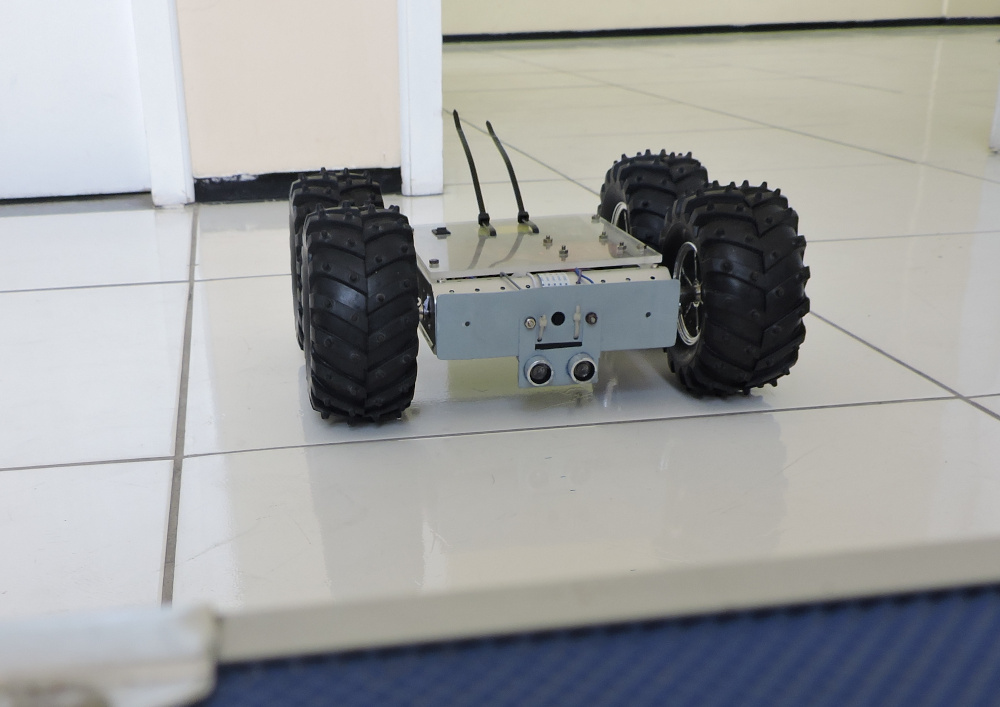
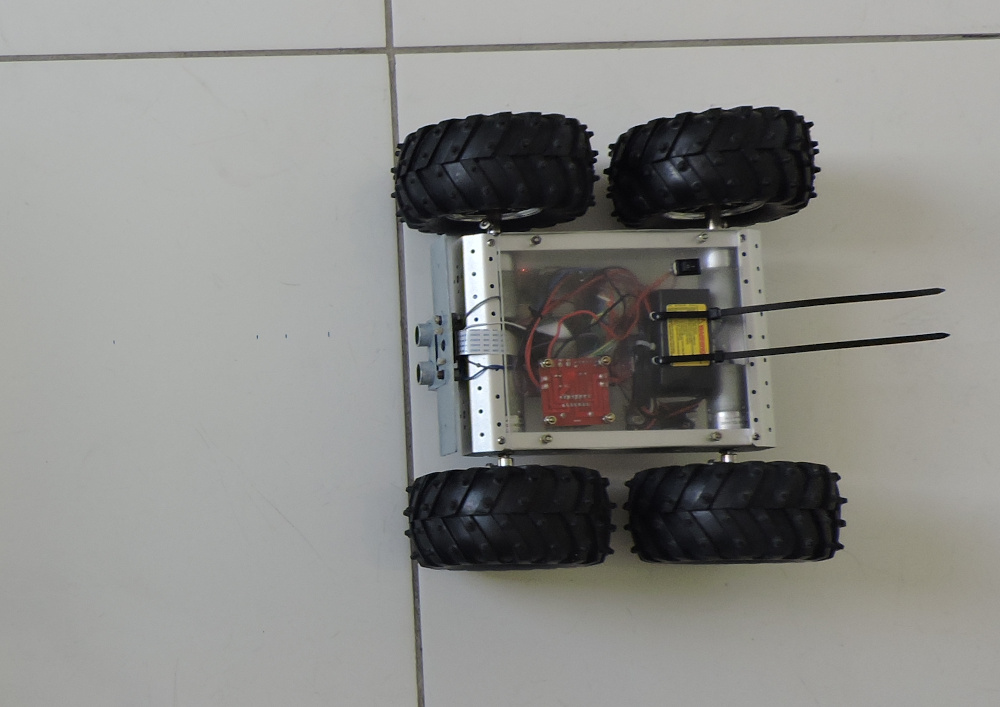
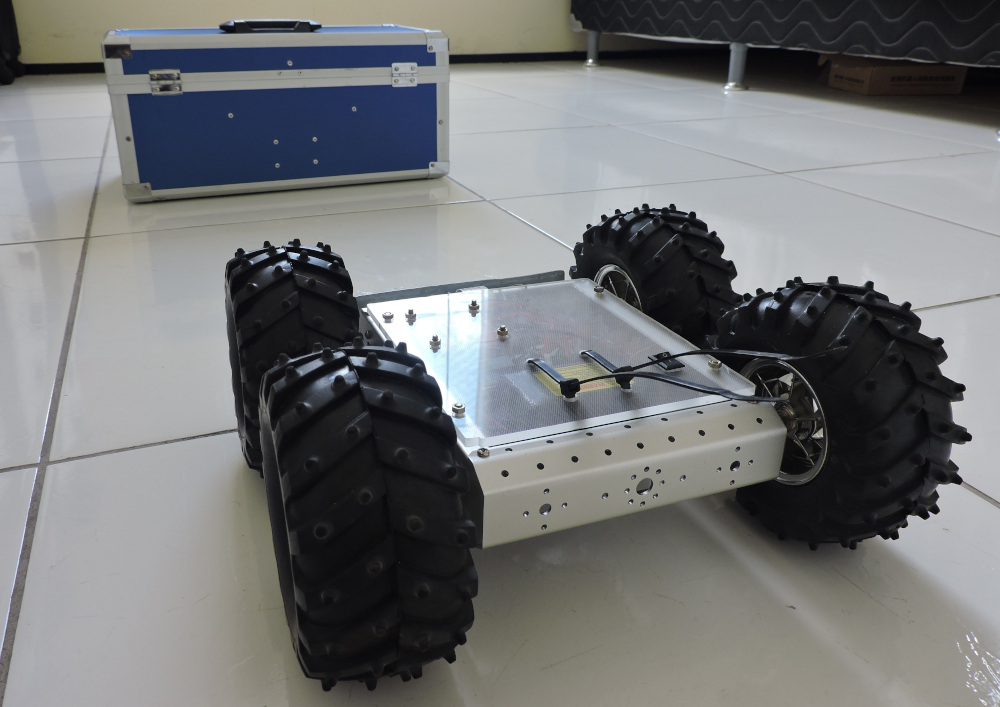
Hydra is a mini robot rover controlled by a Raspberry Pi Model B. It is a differential drive robot, equipped with one ultrasonic sensor, an inertial measurement unit model MPU6050, one RPi camera model v1 and a WiFi module for two-way communication with a companion computer, from which commands can be submitted. At the moment, Hydra is remotely controlled, but an autonomous navigation module is under development. There are also plans of implementing algorithms for object searching. This project is developed in partnership with my friend Márcio Albuquerque and was used in experiments published in Expert Systems with Applications.
This repository contains the code for some of the modules from Hydra, such as cameras, ultrasonic sensors, inertial measurement units and remote control.