Example_Go_NoGo
Go/No-Go task is a common behavioral model for reinforcement learning and discrimination learning. Here, we illustate a Go/No-Go task in mice experiments. The schedule is show as figure below, and there is no need to master any script language when you fulfill it.
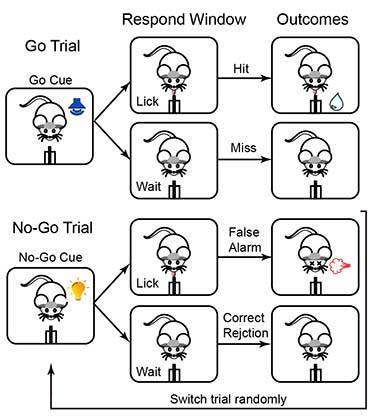
In the Go/NoGo task, mice were body restricted via a head bar and body tube (Guo et al., 2014) and were required to discriminate a go cue (tone) and a no-go cue (light). They would consequently get a reward (water-drop) or a punishment (air-puff) once they respond (lick) to the go cue (tone) or no-go cue (light) during a response window, respectively.
The schedule can be decomposed to a form named State Machine (below).
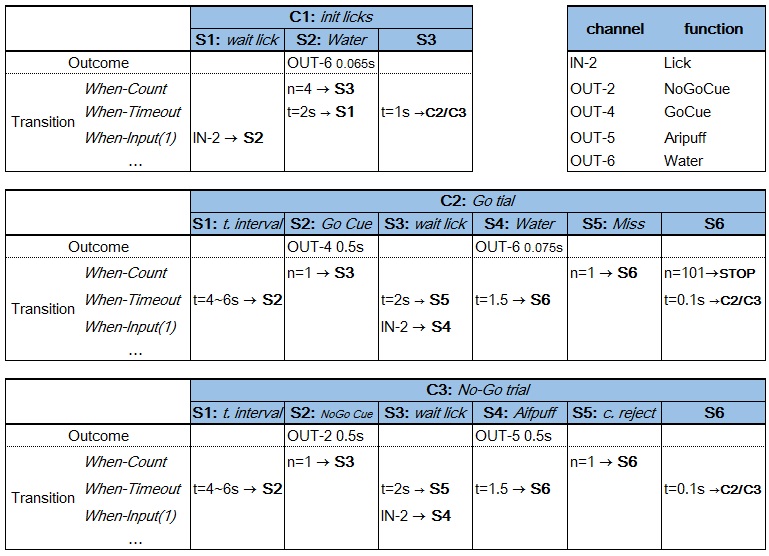
A form of State Machine for Go/NoGo task. A mouse can firstly take "initial lick" (C1, Component-1) to get 4 water drops with ease. Next, the animal should fullfill the normal Go/No-Go task, where "Go Trial" (C2) and "No-Go Trial" (C3) look alike to each other, except for the type of US and CS. The task will automatically stop (end/finish) when the animal run out of 101 "Go Trials".
The form can be fulfilled in ArControl Designer as figure below. This demo has been embeded in release version in ArControl Designer> File > Open in > Go_NoGo, but need to be resaved when you use it for the first time.
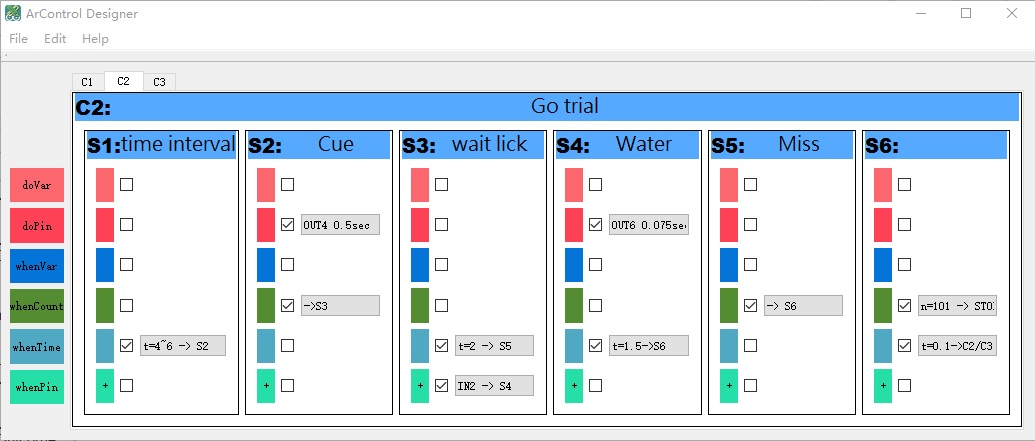
Go/NoGo schedule is decomposed with ArControl Designer.