This repository provides scripts for SED-HSMM and HSM3 in our paper: Onset-and-Offset-Aware Sound Event Detection via Differentiable Frame-to-Event Mapping .
- Onset-and-Offset-Aware Sound Event Detection based on a Hidden Semi-Markov Mixture Model (HSM3)
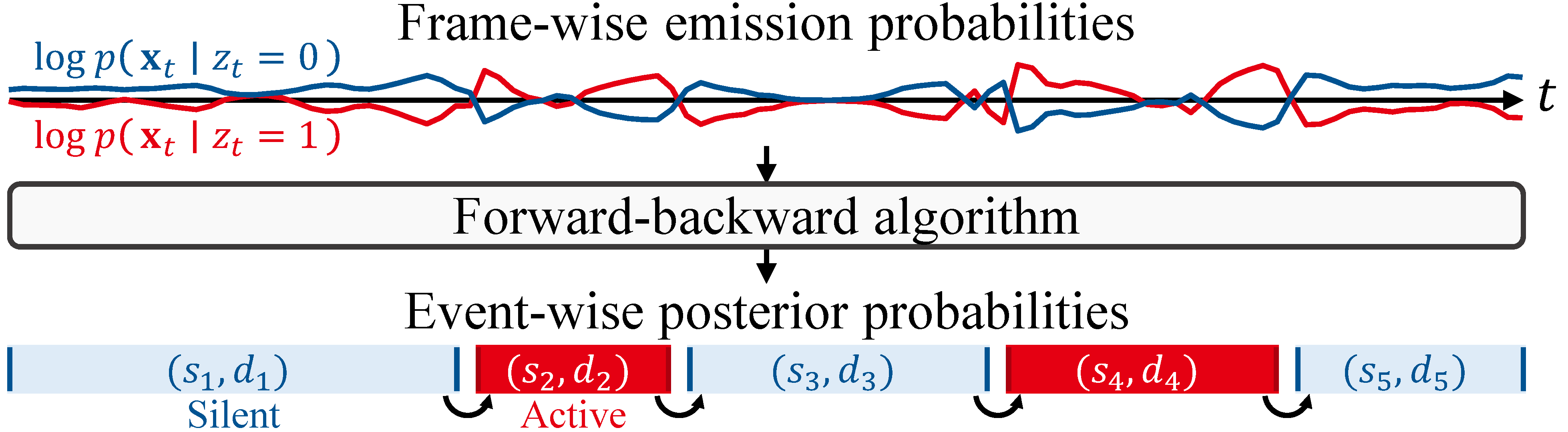
- Differentiable Frame-to-Event Mapping via the Forward-Backward Algorithm
- Easily combinable with standard frame-wise feature extractors (e.g., CRNNs, Conformers)
You can install this package by:
pip install git+https://github.com/b-sigpro/sed-hsmm.gitThis package provides sed_hsmm.HSM3Head as a differentiable frame-to-event mapping layer for the standard frame-wise feature extractors.
It utilizes the forward-backward algorithm to compute posterior probabilities at both the event and frame levels.
Emission probabilities, mixture ratios, and duration distributions are learned as model parameters.
- K (int): Number of components for HSMM mixtures (default: 8)
- L (int): Number of components for gamma distributions of durations (default: 1)
- C (int): Number of output classes (default: 10)
- D (int): Maximum duration (default: 156)
- F (int): Number of input feature channels (default: 256)
- a_00 (float): Self-transition probability for the inactive state (default: 0.99)
- a_10 (float): Transition probability from the active state to the inactive state (default: 0.99)
- h (torch.Tensor): Input feature tensor of shape
(batch_size, F, T)
- logp_event (torch.Tensor): Log posterior probabilities of events with shape
(batch_size, C, N, D, T) - p_frame (torch.Tensor): Posterior frame-wise probabilities with shape
(batch_size, C, T)
Ley y_frame be a torch.Tensor representing frame-level groundtruth labels whose shape is (batch_size, C, T) and contents are 0 (inactive) or 1 (active).
The event-wise loss function can be calculated by:
from sed_hsmm import HSM3Head, EventProbabilityLoss, convert_labels
crnn = CRNN(...) # please provide yourself
hsm3_head = HSM3Head(F=crnn.out_channels) # initialize HSM3Head
calc_event_loss = EventProbabilityLoss()
...
h = crnn(log_mel) # calculate frame-wise features with shape `(batch_size, F, sequence_length)`
logp_event, p_frame = hsm3_head(h) # calculate event-level posterior probabilities
...
# calculate loss function
y_event = convert_labels(y_frame)
loss = calc_event_loss(logp_event, y_event)- We are now preparing full recipes for building a CRNN-based SED system
Please cite as:
@article{yoshinaga2025onset,
title={Onset-and-Offset-Aware Sound Event Detection via Differentiable Frame-to-Event Mapping},
author={Yoshinaga, Tomoya and Tanaka, Keitaro and Bando, Yoshiaki and Imoto, Keisuke and Morishima, Shigeo},
journal={IEEE Signal Processing Letters},
volume={32},
year={2024},
pages={186-190},
publisher={IEEE}
}This study was supported in part by the JSPS KAKENHI under Grant No. 24K20807.