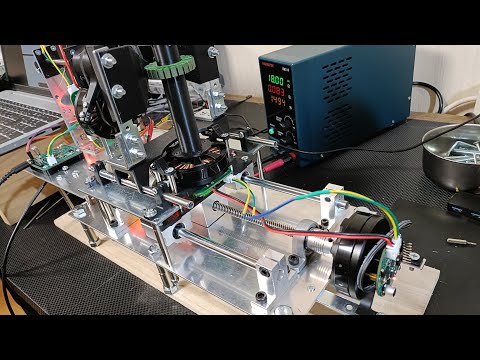
Winding the wire for a BLDC motor is a time-consuming and labor-intensive process. This winding machine automates this tedious tasks.
This machine uses four motors to perform the winding operation:

- M0: Move M1 unit (closed loop control)
- M1: Rotate the stator (closed loop control)
- M2: Wind the wire (closed loop control)
- M3: Adjust the wire tension (closed loop torque control using voltage)
code: Aotenjo One
All motors are controlled by Aotenjo Master, a master controller board based on the STM32G431CBU6 microcontroller. It communicates with the host computer via USB and controls the motors via CAN bus.

code: Aotenjo Master
Power supply: 18V 1.5A
- M0: BE4108 75T gimbal motor (built with this machine)
- M1: BE4108 75T gimbal motor (built with this machine)
- M2: BE4108 75T gimbal motor (built with this machine)
- M3: BE4108 60T gimbal motor (built with this machine)
BE4108 75T gimbal motor

This motor was initially a drone motor.

See simulation/README.md for details.