An AI-powered Visual Studio Code extension for creating ROS 2 packages from intelligent templates. This extension leverages GitHub Copilot and Language Models to generate complete, functional ROS 2 packages in C++, Python, and Node.js.
- Natural Language Descriptions: Describe your ROS 2 node in plain English and let AI generate the complete implementation
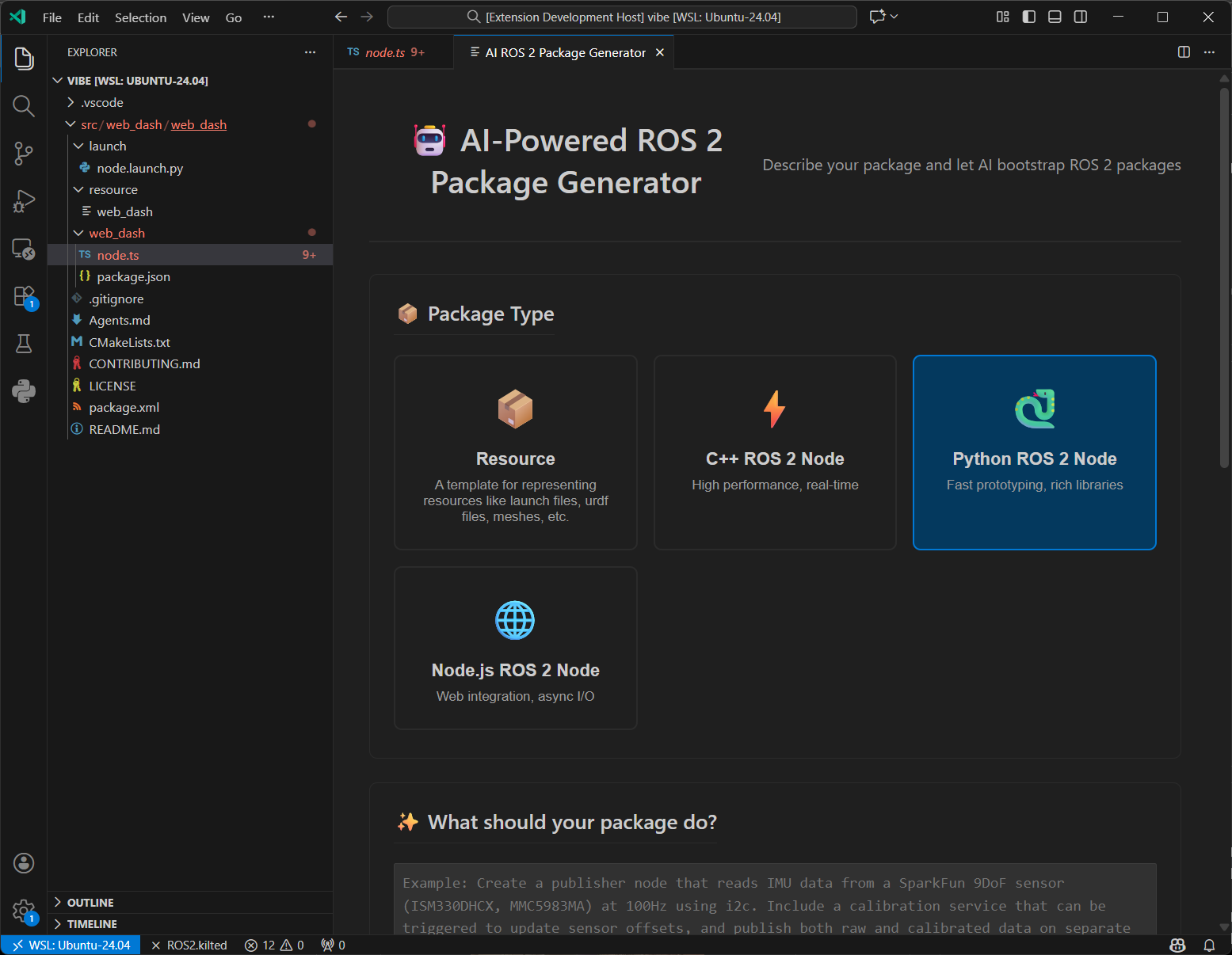
- Template-Based Creation: Choose from pre-built templates for common ROS 2 patterns
- Multi-Language Support: Generate packages in C++, Python, and Node.js
- Intelligent Code Completion: Templates include GitHub Copilot prompts for enhanced development
High-performance, real-time ROS 2 composable nodes with:
- Modern C++17+ standards
- Proper visibility control for Windows/Linux compatibility
- Component-based architecture with
rclcpp_components - Optional lifecycle management
- Comprehensive error handling and logging
Fast prototyping with rich libraries:
- Modern Python 3.12+ syntax
- Async/await patterns for concurrent operations
- Comprehensive docstrings and type hints
- Built-in test generation with pytest
Web integration and async I/O:
- Full rclnodejs integration
- Promise-based asynchronous operations
- Web-friendly development patterns
- REST API integration capabilities
Configuration and asset management:
- URDF files for robot descriptions
- Launch configurations
- Mesh files and assets
- Configuration files and parameters
- Install the extension from the VS Code marketplace
- Ensure you have ROS 2 installed and sourced
- Install GitHub Copilot Chat extension for AI-powered generation
- Open Command Palette (
Ctrl+Shift+P/Cmd+Shift+P) - Run Command: "ROS 2: Create Package"
- Choose Template: Select from C++, Python, Node.js, or Resource templates
- Configure Options: Set package metadata and features
- AI Generation (Optional): Describe your node functionality in natural language
- Generate: The extension creates a complete, buildable ROS 2 package
- Right-click in the Explorer panel on any folder
- Select: "Create ROS 2 Package Here"
- Follow the same configuration steps
- Composable Nodes: Full
rclcpp_componentssupport - Visibility Control: Cross-platform symbol visibility management
- Lifecycle Support: Optional
rclcpp_lifecycleintegration - Modern CMake: Automatic ROS distribution detection
- Testing: Integrated gtest framework with proper discovery
- Async Support: Native asyncio integration
- Type Hints: Full type annotation support
- Testing: pytest integration with ROS 2 fixtures
- Documentation: Auto-generated docstrings
- Promise-Based: Modern async/await patterns
- Web Integration: HTTP server capabilities
- Testing: Jest integration with ROS 2 mocks
- Generate Package: Use the extension to create your initial package structure
- Customize: Modify generated code to fit your specific requirements
- Build & Test: Use standard ROS 2 tools (
colcon build,colcon test) - Iterate: Leverage GitHub Copilot for code enhancements and debugging
- VS Code: Latest version recommended
- ROS 2: Humble, Iron, Jazzy, or Kilted
- GitHub Copilot: For AI-powered generation (optional but recommended)
- Node.js: For the extension itself (comes with VS Code)
"Language Model API not available"
- Ensure GitHub Copilot Chat extension is installed and active
- Check that you have a valid GitHub Copilot subscription
"Template generation failed"
- Verify ROS 2 environment is properly sourced
- Check that target directory is writable
- Ensure template manifests are valid
"Build failures after generation"
- Verify all ROS 2 dependencies are installed
- Check that generated CMakeLists.txt matches your ROS distribution
- Ensure visibility control headers are properly configured
MIT License - see LICENSE for details