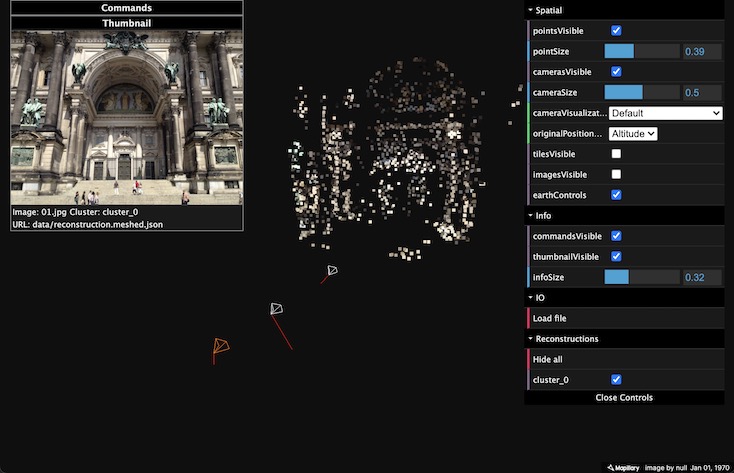
OpenSfM is a Structure from Motion library written in Python. The library serves as a processing pipeline for reconstructing camera poses and 3D scenes from multiple images. It consists of basic modules for Structure from Motion (feature detection/matching, minimal solvers) with a focus on building a robust and scalable reconstruction pipeline. It also integrates external sensor (e.g. GPS, accelerometer) measurements for geographical alignment and robustness. A JavaScript viewer is provided to preview the models and debug the pipeline.
Checkout this blog post with more demos
Implemented part of bundle adjust (estimating depths for 3D point cloud) using bit-sliced indexing, optimized by 100 times the original runtime
OpenSfM is BSD-style licensed, as found in the LICENSE file. See also the Facebook Open Source Terms of Use and Privacy Policy