ar_drone_moveit troubles #7
Description
Hi all,
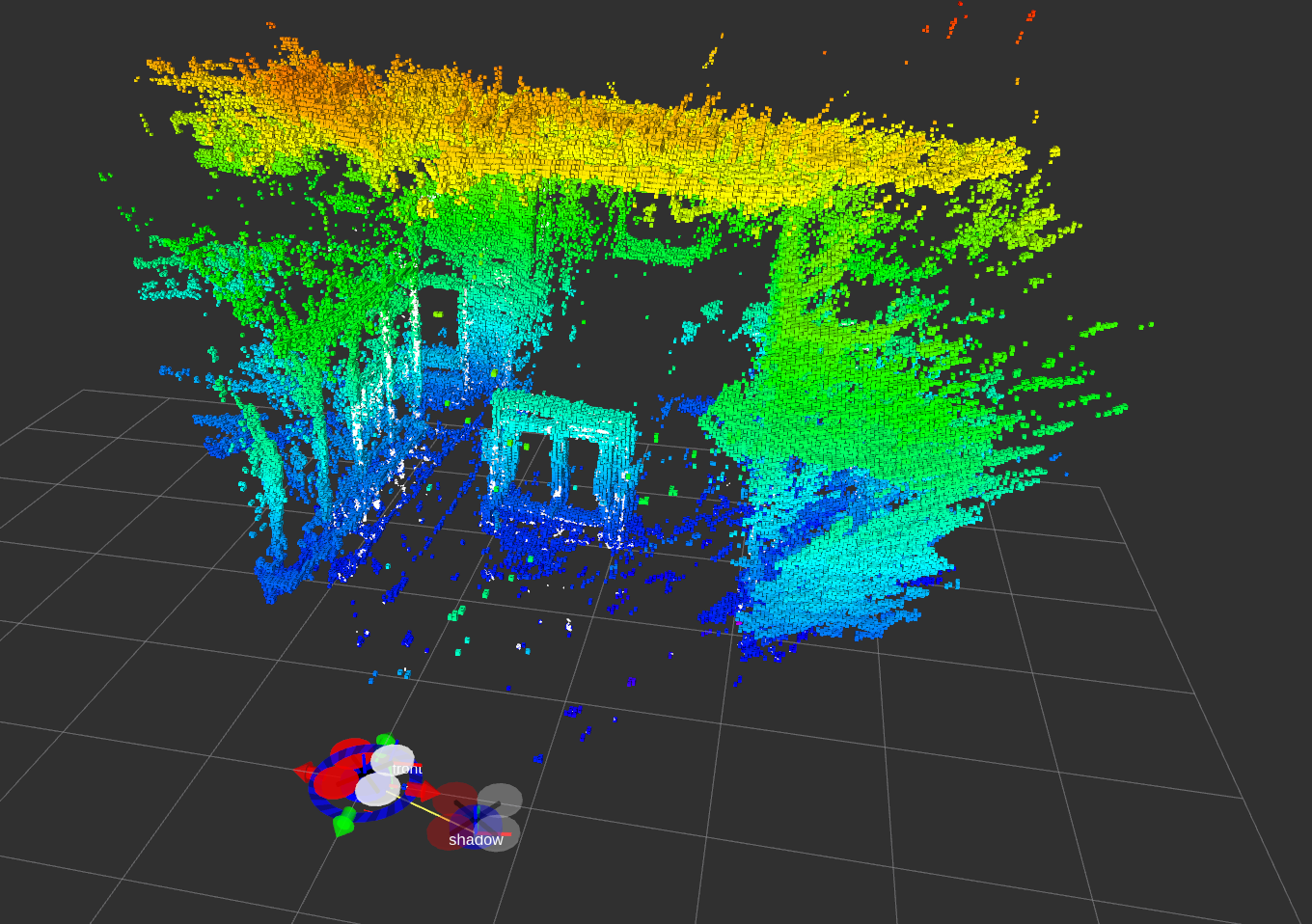
I have download and edit octomap_server to made my own octomap generation like this :

With three types of voxels(Occupied, free and unknown).
I use Octomap.launch , the same as in ar_drone_moveit folder but in the octomap_server folder.
Now I want to use moveit to planify a path with my drone.
But when I use Demo.launch I have the default octomap generation like this :
Do you know how change the octomap generation by my version?
In a second time when I try to planify a path, I have this error : "No Planning Library Loaded"
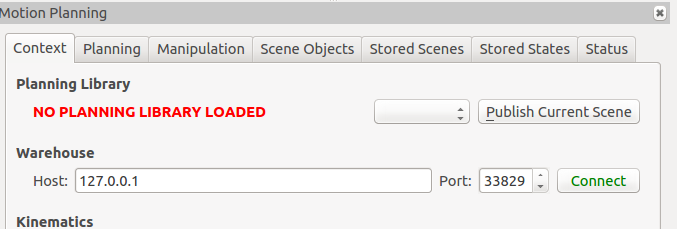
And if I click on 'Plan' it failed immediately.
Someone see the cause of this problem?
EDIT: After some updates and packages installation, my problem with the planning library is solved!
I can plan a path and visualize it in RVIZ.
Thx