|
63 | 63 | "\n", |
64 | 64 | "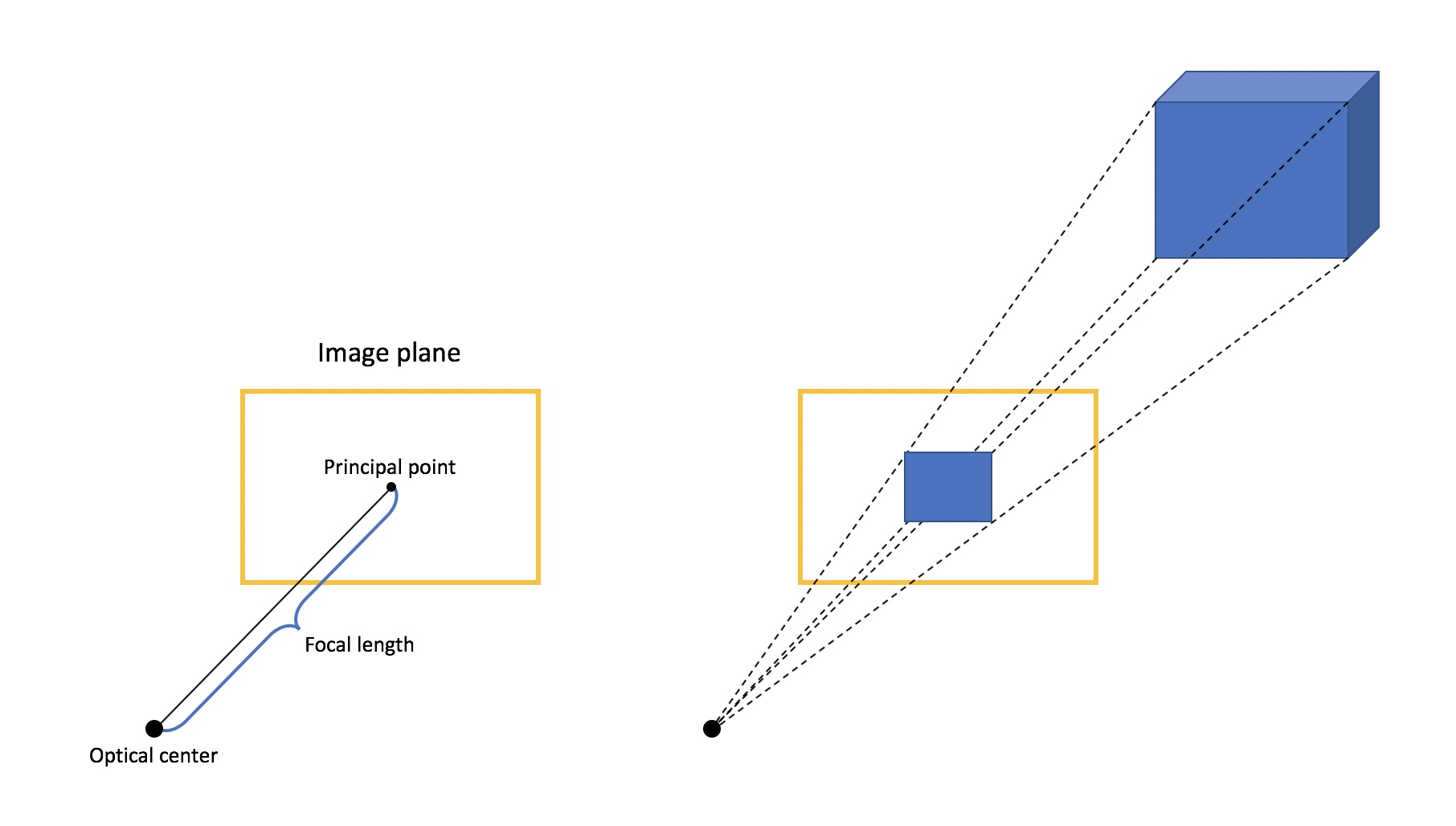\n", |
65 | 65 | "\n", |
66 | | - " This model is composed of two parameters that are often refered to as intrinsic parameters:\n", |
| 66 | + " This model is composed of two parameters that are often referred to as intrinsic parameters:\n", |
67 | 67 | "- the principal point, which is the projection of the optical center on the image. Ideally, the principal point is close to the center of the image.\n", |
68 | 68 | "- the focal length, which is the distance between the optical center and the image plane. This parameters allows to control the level of zoom.\n", |
69 | 69 | "\n", |
70 | | - "This notebook illustrates how to use [Tensorflow Graphics](https://github.com/tensorflow/graphics) to estimate the intrinsic parameters of a projective camera. Recovering these parameters is particularly imporant to perform several tasks, including 3D reconstruction.\n", |
| 70 | + "This notebook illustrates how to use [Tensorflow Graphics](https://github.com/tensorflow/graphics) to estimate the intrinsic parameters of a projective camera. Recovering these parameters is particularly important to perform several tasks, including 3D reconstruction.\n", |
71 | 71 | "\n", |
72 | 72 | "In this Colab, the goal is to recover the intrinsic parameters of a camera given an observation and correspondences between the observation and the render of the current solution. Things are kept simple by only inserting a rectangle in the 3D scene, and using it as the source of correspondences during the optimization. The minimization is performed using the Levenberg-Marquardt algorithm." |
73 | 73 | ] |
|
222 | 222 | "ideal_principal_point = np.array(\n", |
223 | 223 | " (image_width, image_height), dtype=np.float64) / 2.0\n", |
224 | 224 | "\n", |
225 | | - "# Let's see what our scene looks like using the intrinsic paramters defined above.\n", |
| 225 | + "# Let's see what our scene looks like using the intrinsic parameters defined above.\n", |
226 | 226 | "render = render_rectangle(rectangle_vertices, focal_lengths, ideal_principal_point,\n", |
227 | 227 | " image_dimensions)\n", |
228 | 228 | "_ = plt.imshow(render)" |
|
355 | 355 | "id": "QTdXuY6BapnT" |
356 | 356 | }, |
357 | 357 | "source": [ |
358 | | - "As described earlier, one can compare how the 3D object would look using the current estimate of the intrinsic parameters, can compare that to the actual observation. The following function captures a distance beween these two images which we will seek to minimize." |
| 358 | + "As described earlier, one can compare how the 3D object would look using the current estimate of the intrinsic parameters, can compare that to the actual observation. The following function captures a distance between these two images which we will seek to minimize." |
359 | 359 | ] |
360 | 360 | }, |
361 | 361 | { |
|
403 | 403 | "real_focal_lengths, real_principal_point, estimate_focal_lengths, estimate_principal_point = build_parameters(\n", |
404 | 404 | ")\n", |
405 | 405 | "\n", |
406 | | - "# Contructs the observed image.\n", |
| 406 | + "# Constructs the observed image.\n", |
407 | 407 | "observation = render_rectangle(rectangle_vertices, real_focal_lengths,\n", |
408 | 408 | " real_principal_point, image_dimensions)\n", |
409 | 409 | "\n", |
|
444 | 444 | "version": "0.3.2" |
445 | 445 | }, |
446 | 446 | "kernelspec": { |
447 | | - "display_name": "Python 2", |
448 | | - "name": "python2" |
| 447 | + "display_name": "Python 3", |
| 448 | + "name": "python3" |
449 | 449 | } |
450 | 450 | }, |
451 | 451 | "nbformat": 4, |
|
0 commit comments