This folder has a script log_listener.py, used to display Log messages generated by various ROS nodes.
The folder is also a ROS package "data_logger" containing two dummy nodes imu_log.py and and lidar_log.py used to generate dummy log messages to test the above script.
Run the dummy nodes using following ros commands
$ rosrun data_logger imu_log.py
$ rosrun data_logger lidar_log.py
Execute python code with list of nodes as arguments for filter
python log_listener.py /imu /lidarGUI filter display OUTPUT:
************ INFO ************
Cannot divide by zero lineno - 24 count -22 /imu imu_log.py
Cannot divide by zero lineno - 25 count -7 /lidar lidar_log.py
************ WARN ************
Reached End-Of-File warning lineno - 37 count -24 /imu imu_log.py
Reached End-Of-File warning lineno - 38 count -9 /lidar lidar_log.py
************ DEBUG ************
This is a debug message 6 /lidar lidar_log.py
This is a debug message 26 /imu imu_log.py
************ ERROR ************
IO Error has occurred lineno - 31 count -23 /imu imu_log.py
IO Error has occurred lineno - 32 count -8 /lidar lidar_log.py
************ FATAL ************
Fatal Error Occurred lineno - 43 count -25 /imu imu_log.py
Fatal Error Occurred lineno - 44 count -10 /lidar lidar_log.py
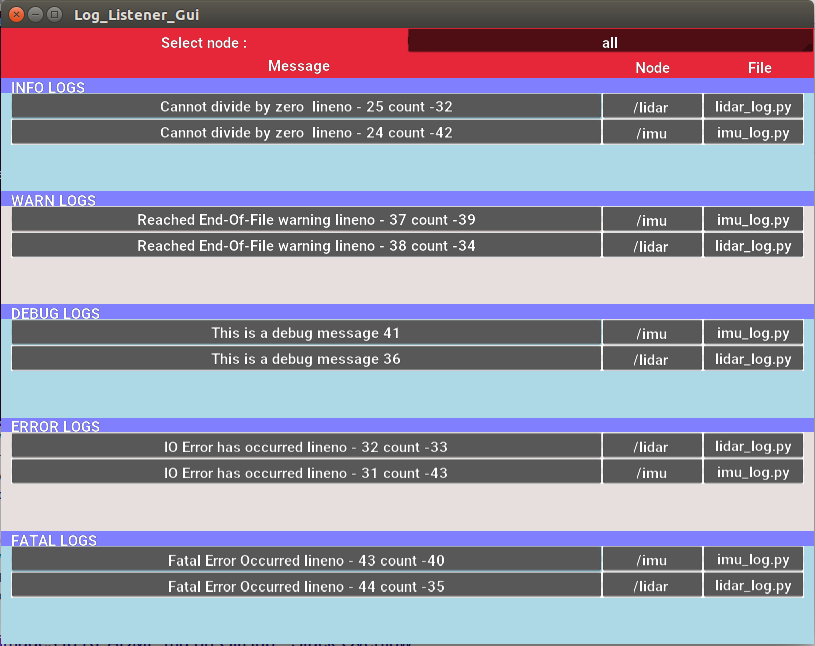
A GUI for the above tool has been created using Kivy framework. Its available in the folder KivyDataLogger
Execute the below python file to open the GUI.
python log_listener_gui.py