| title |
|---|
MaixCAM MaixPy 使用 PWM |
在 MaixPy (v4) 中使用 PWM,先使用pinmap设置引脚的功能为 PWM,在使用。
以及每个 PWM 有对应的引脚,根据 MaixCAM 的引脚图可以看到:
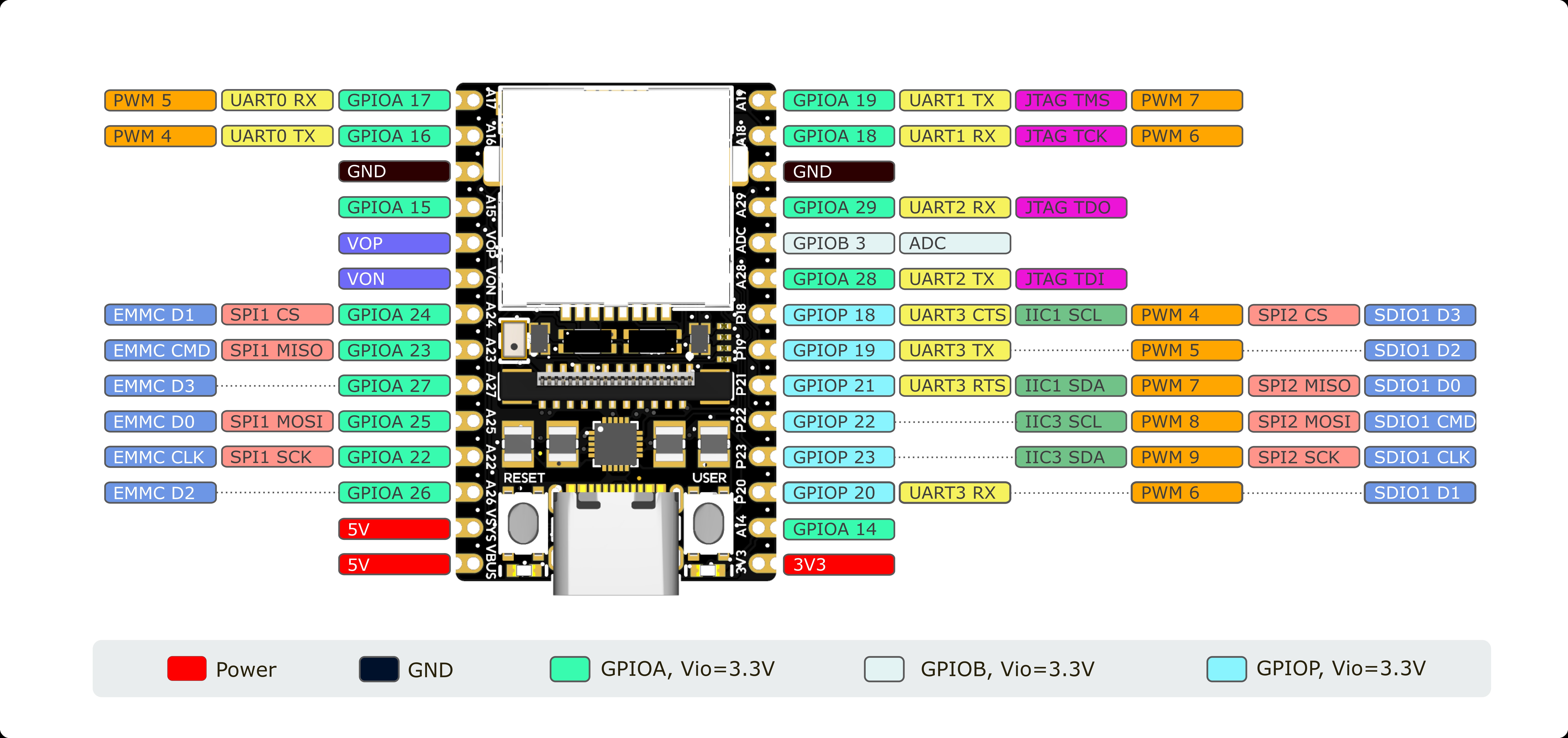

这里我们推荐使用PWM6 和 PWM7。
对于 MaixCAM 因为WiFi 使用了SDIO1的所有引脚,所以PWM4~9只能和WiFi二选一使用。
TODO: 提供禁用 WiFi 的方法(需要系统里面禁用掉 WiFi 驱动,比较复杂)
这里我们以控制舵机为例, 使用MaixCAM的PWM7和A19引脚:
from maix import pwm, time, pinmap
SERVO_PERIOD = 50 # 50Hz 20ms
SERVO_MIN_DUTY = 2.5 # 2.5% -> 0.5ms
SERVO_MAX_DUTY = 12.5 # 12.5% -> 2.5ms
# Use PWM7
pwm_id = 7
# !! set pinmap to use PWM7
pinmap.set_pin_function("A19", "PWM7")
def angle_to_duty(percent):
return (SERVO_MAX_DUTY - SERVO_MIN_DUTY) * percent / 100.0 + SERVO_MIN_DUTY
out = pwm.PWM(pwm_id, freq=SERVO_PERIOD, duty=angle_to_duty(0), enable=True)
for i in range(100):
out.duty(angle_to_duty(i))
time.sleep_ms(100)
for i in range(100):
out.duty(angle_to_duty(100 - i))
time.sleep_ms(100)这里的功能是控制舵机从最小角度旋转到最大角度再旋转回最小角度。