Laser distance scan sensor (LDS/LIDAR) Arduino wrapper/controller for kaia.ai home robot software platform. Please read this blog post for more details.
This library supports:
- YDLIDAR X4, X3, X3-PRO, X2/X2L models
- SLAMTEC RPLIDAR A1
- Neato XV11/Botvac
- Xiaomi Roborock Mi 1st gen LDS02RR
- 3drobotix Delta-2A, Delta-2B, Delta-2G, Delta-2A 115000 baud
- LDROBOT LD14P
Other models are in the works.

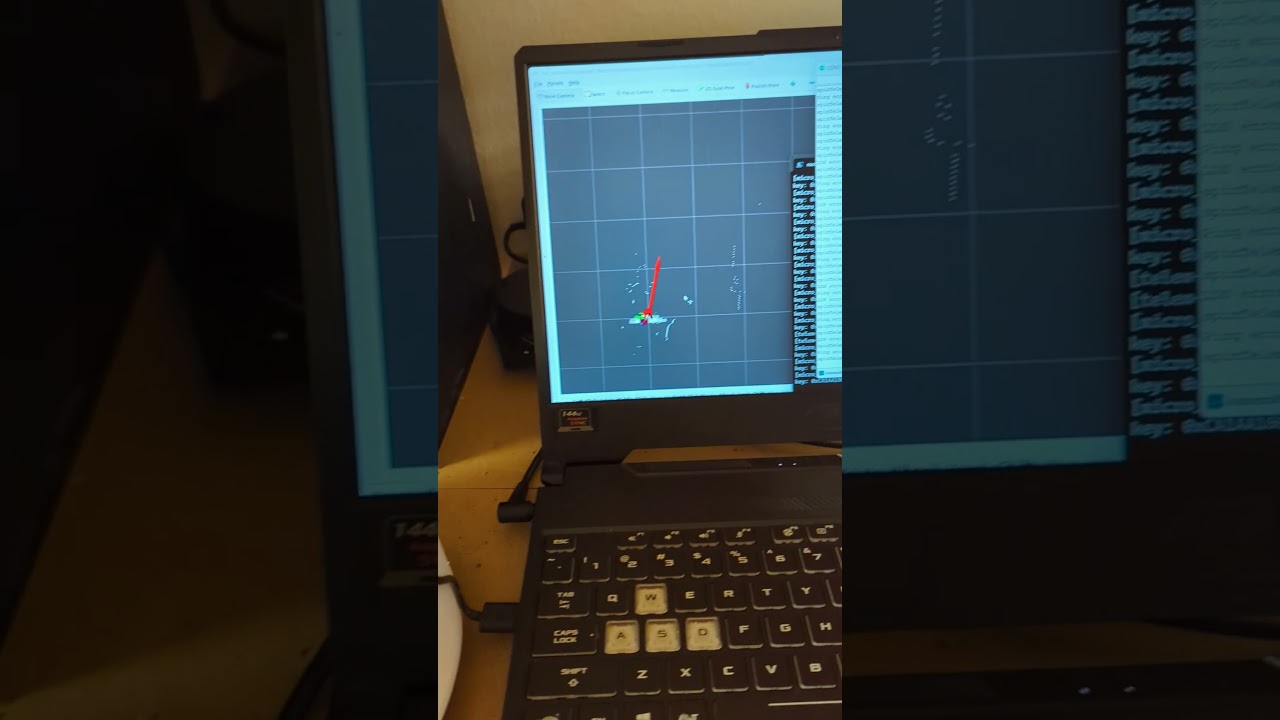


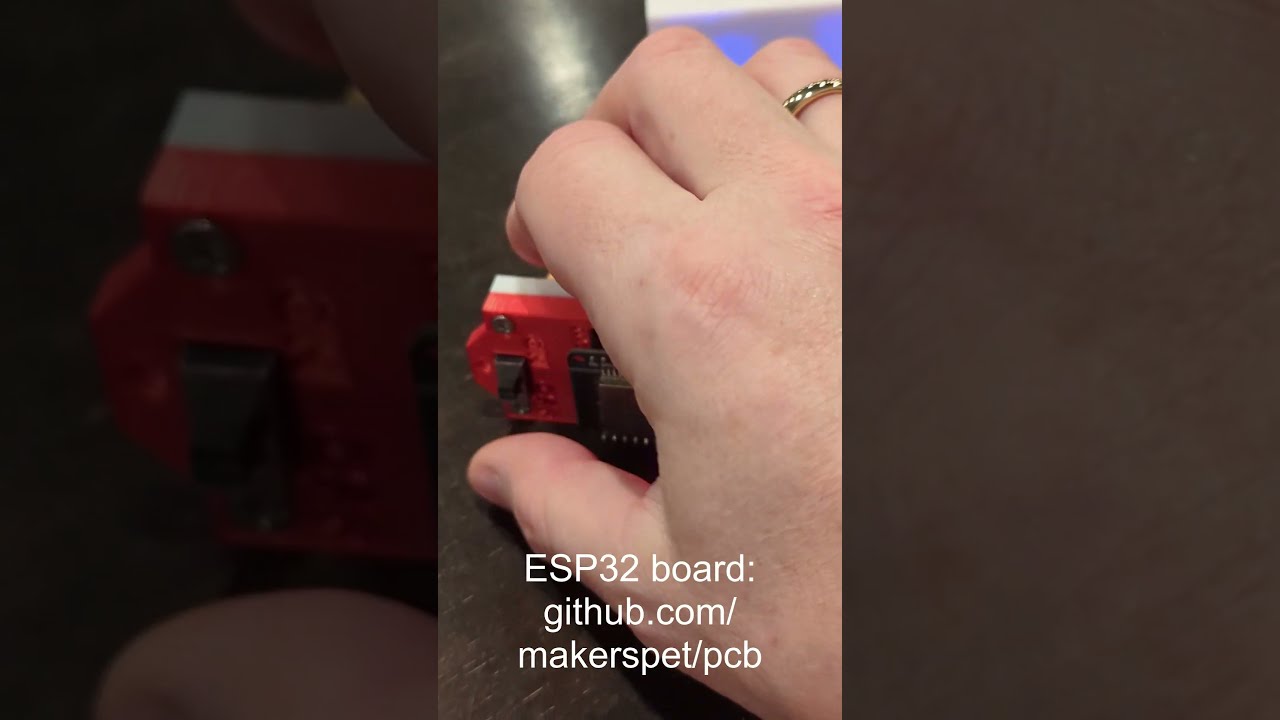

Please follow this tutorial to connect LDROBOT LD14P to Arduino ESP32.
Some LiDAR/LDS models do not have built-in motor control and therefore require an additional board to operate:
- for Xiaomi Roborock 1st gen LDS02RR use this board
- for Neato XV11 use this board
- for 3irobotix Delta-2A, -2B, -2C PRO, -2D, -2G use this board
- currently Delta-2A, -2B, -2G exhibit mysterioius fixed pattern noise
- I'm sure it can be fixed, but so far I haven't heard back from 3irobotix support.
- added Delta-2A 230400 baud
- added Delta-2B
- Camsense X1
- added LDROBOT LD14P
- bugfix
lds_all_models.hinclude file
- added Delta-2A, Delta-2G
- added Neato XV11
- added RPLIDAR A1
- added YDLIDAR X3, X3 PRO
- report scan RPM for all sensor models
- added YDLIDAR X2/X2L
- measure RPM for YDLIDAR X4, YDLIDAR X2/X2L
- virtual class methods
- ESP32 crash workaround by moving init code from constructor out to init()
- example bugfix
- renamed classes
- initial release
- add Xiaomi Roborock LDS01RR
- add LDROBOT LD20
- add Hitachi-LG HLS-LFCD2
- add Dreame TBD
- reduce raw data volume
- omit measurement quality since it usually does not get used