Connecting OpenAI Gym and ROS
- Introduction
- Backgrounds 1.1 RL algo 1.2 Robotics
- Open Manipulator
2.1 Dependencies
2.2 Installation - Create the open manipulator environment
- References
Openai Gym은 Environments를 제공함으로써 강화학습 알고리즘을 비교하는것을 가능하게 한다. 하지만 Openai Gym에서의 로봇 학습 환경은 Gazebo를 이용하는 ROS 기반의 로봇들을 학습하게는 못하는 단점이 있다. 본 페이지는 이러한 Openai Gym과 ROS를 연결하여 Gazebo상에서의 Robot과 Gym 환경을 통해 강화학습을 수행하는 것을 목적으로 한다.
먼저 openai_ros package를 설치하여야한다.
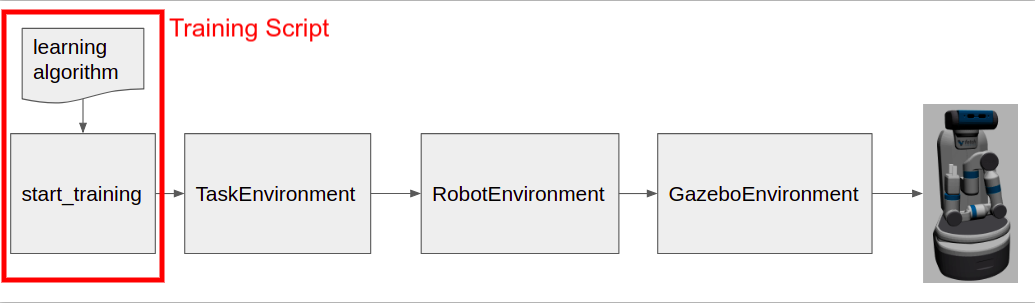
- GazeboEnvironment: Gazebo와 Openai 환경을 연결한다. openai_ros package에서 robot_gazebo_env.py에 class code를 확인 할 수 있다. 수정이 필요한 경우 이곳에서 확인 하면 된다.
- RobotEnvironment: ROS 기반의 주요 로봇들을 지원한다. 센서 정보를 받아오거나 actions를 보낼 때 사용된다.
- TaskEnvironment: GazeboEnvirionment와 RobotEnvironment에 함께 로봇을 학습 시킬때 수행될 task에 대한 정의가 있는 class이다.
- openai_ros wiki: http://wiki.ros.org/openai_ros
- open manipulator manuel: http://emanual.robotis.com/docs/en/platform/openmanipulator/ https://github.com/ROBOTIS-GIT/open_manipulator
- gazebo and ros: http://gazebosim.org/tutorials/?tut=ros_control
- reinforcement learning codes: https://github.com/medipixel/rl_algorithms
