Waypoint planner package provides the local planner nodes that dynamically plan avoidance behavior, velocity on waypoints, and so on.
astar_avoid node has two mode, Relay mode and Avoidance mode. You can switch these modes by enable_avoidance parameter.
- Relay mode: Not avoid planning and just publishing waypoints from self pose.
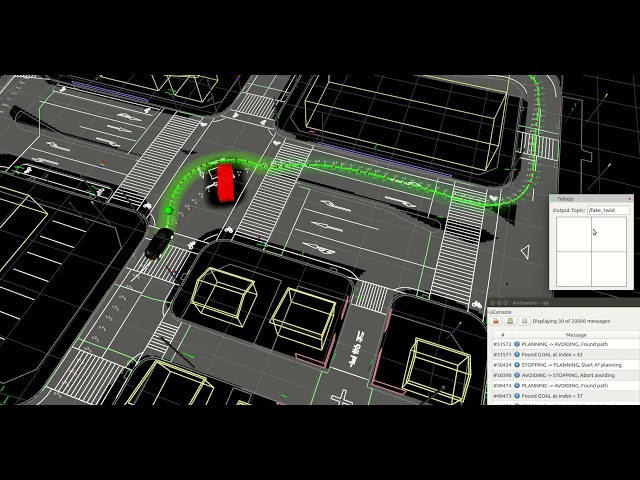
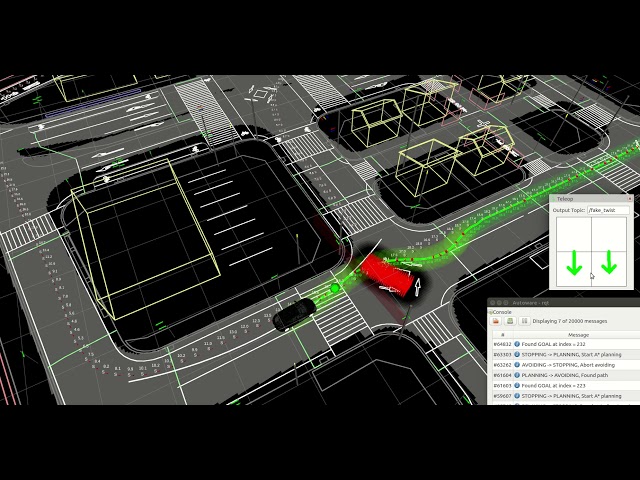
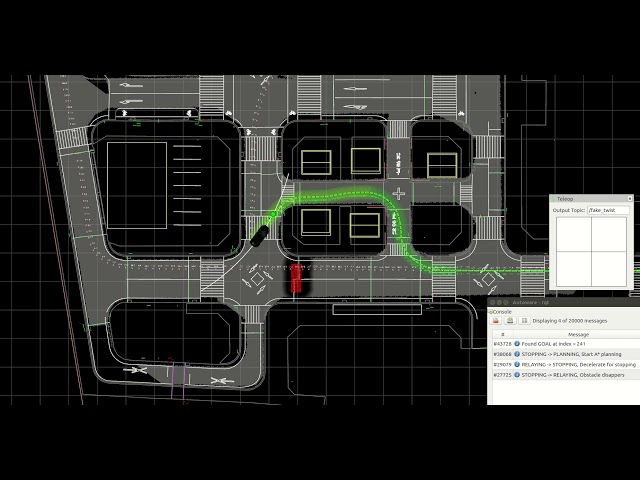
- Avoidance mode: Avoiding obstacles by Hybrid-A* search algorithm in
astar_searchpackage with internal state transition
NOTE : If you have wayarea in your ADAS map, it's possible to limit search area and realize more safety planning by enabling Use Wayarea in costmap_generator node. Please see the results in below demo videos.
Please see also: mission/packages/freespace_planner/README.md
- From Runtime Manager:
Computing -> Motion Planning -> waypoint_planner -> astar_avoid
- From CLI:
$ roslaunch waypoint_planner astar_avoid.launch
Parameters can be set in both Launch file and Runtime manager:
| Parameter in RM | Parameter in Launch | Type | Description | Default |
|---|---|---|---|---|
Enable Avoidance |
enable_avoidance |
Bool | Enable avoidance mode | false |
Costmap Topic |
costmap_topic |
String | Costmap topic for Hybrid-A* search | semantics/costmap_generator/occupancy_grid |
Waypoint Velocity |
avoid_waypoints_velocity |
Double | Constant velocity on planned waypoints [km/h] | 10.0 |
Avoidance Start Velocity |
avoid_start_velocity |
Double | Self velocity for staring avoidance behavior [km/h] | 5.0 |
Replan Interval |
replan_interval |
Double | Replan interval for avoidance planning [Hz] | 2.0 |
| - | safety_waypoints_size |
Int | Output waypoint size [-] | 100 |
| - | update_rate |
Double | Publishing rate [Hz] | 10.0 |
| - | search_waypoints_size |
Int | Range of waypoints for incremental search [-] | 50 |
| - | search_waypoints_delta |
Int | Skipped waypoints for incremental search [-] | 2 |
Node [/astar_avoid]
Publications:
* /safety_waypoints [autoware_msgs/Lane]
Subscriptions:
* /base_waypoints [autoware_msgs/Lane]
* /closest_waypoint [std_msgs/Int32]
* /current_pose [geometry_msgs/PoseStamped]
* /current_velocity [geometry_msgs/TwistStamped]
* /semantics/costmap_generator/occupancy_grid [nav_msgs/OccupancyGrid]
* /obstacle_waypoint [std_msgs/Int32]
* /tf [tf2_msgs/TFMessage]
* /tf_static [tf2_msgs/TFMessage]
// TODO