 + src="https://files.seeedstudio.com/wiki/reComputer/Application/reComputer_J4012.png" />
+ src="https://files.seeedstudio.com/wiki/reComputer/Application/reComputer_J4012.png" />
+ src="https://files.seeedstudio.com/wiki/reComputer/Application/reComputer_J4012.png" />
+ src="https://files.seeedstudio.com/wiki/reComputer/Application/reComputer_J4012.png" />
+ src="https://files.seeedstudio.com/wiki/reComputer/Application/reComputer_J4012.png" />
+ src="https://files.seeedstudio.com/wiki/reComputer/Application/reComputer_J4012.png" />
+ src="https://files.seeedstudio.com/wiki/reComputer/Application/reComputer_J4012.png" />
+ src="https://files.seeedstudio.com/wiki/reComputer/Application/reComputer_J4012.png" />
 +
+
 +
+| I/O | +Ethernet | + 1x LAN0 RJ45 GbE (10/100/1000Mbps), 1x LAN RJ45 GbE PoE(PSE 802.3 af 15 W, 10/100/1000Mbps) |
+
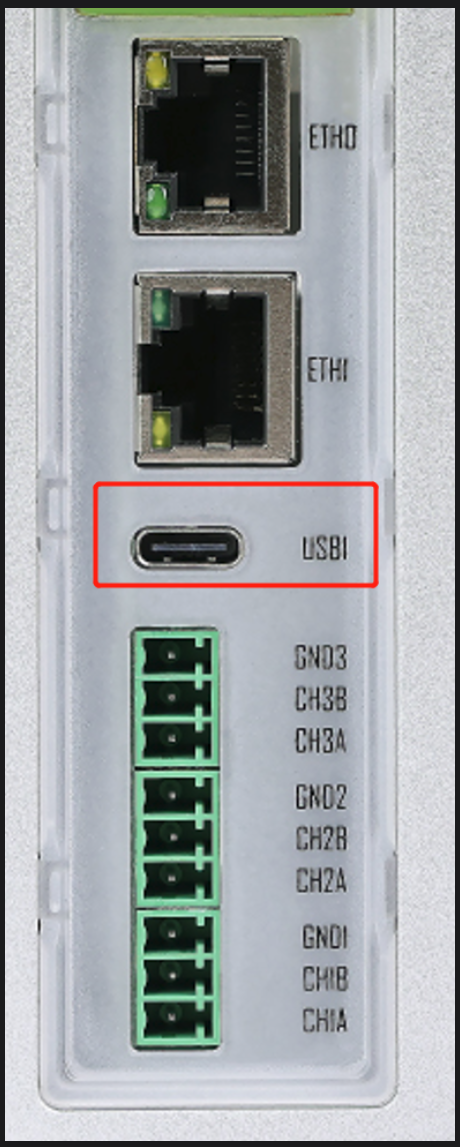
| USB | + 3x USB3.1, 1x USB3.1 Type C(Host mode), 1x USB2.0 Type C(Device mode) |
+ |
| DI/DO | +4x DI,4x DO,3x GND_DI,2x GND_DO,1x GND_ISO,1x CAN +1x RS232/RS422/RS485 | +|
| Display | +1x HDMI 2.1 Type A 7680x4320 | +|
| SATA | +2x SATA III 6.0Gbps at 30 Hz | +|
| SIM | +1x Nano SIM card slot | +|
| Button | +Reset Button, Recovery Button | +|
| Expansion | +Mini PCIE | +1x Mini PCIe for LoRaWAN®/4G/Series Wireless (Module not included) | +
| M.2 Key B | +1x M.2 Key B (3042/3052) support 4G/5G (Module not included) | +|
| M.2 Key E | +1x M.2 Key E | +|
| M.2 Key M | +1x M.2 Key M (PCIE 4.0) | +|
| Fan | +1x Fan connectors (5V PWM) | +|
| TPM | +1x TPM 2.0 connector (Module not included) | +|
| RTC | + 1x RTC socket (CR1220 included), 1x RTC 2-pin |
+ |
| Camera | +2x Expansion connector (8lanes for each connector) | +|
| PCIE | +1x PCIE | +|
| Power | +Power Supply | +DC 12V-36V Terminal block 2 pin (included 24V/5A Power Adapter) | +
| Mechanical | +Dimensions (W x D) | +176 x 163mm (Module not included) | +
| Operating Temerature | +-20~60℃ | +|
| Weight | +225g (Module not included) | +
 +
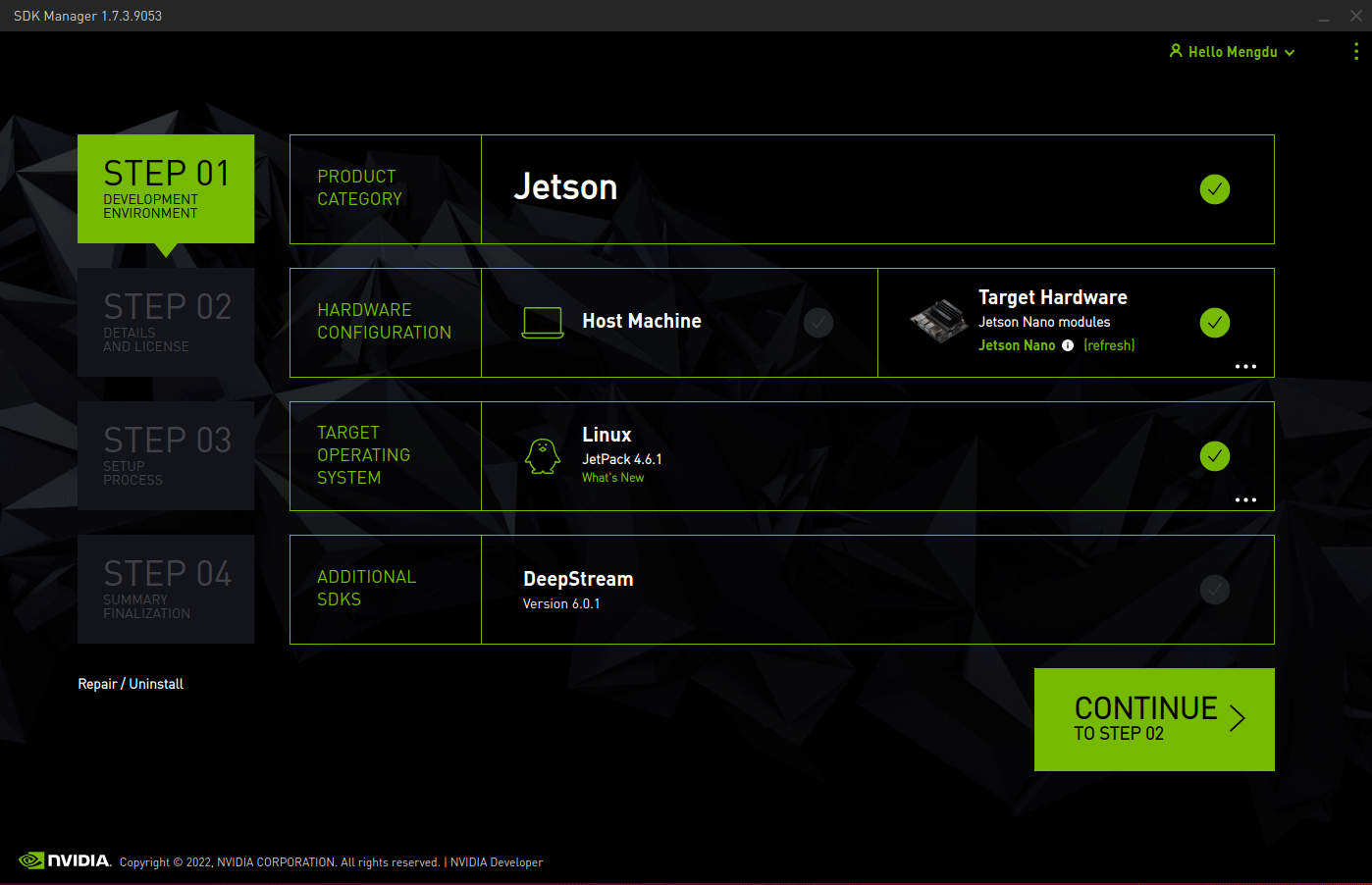
+| Jetpack Version | +Jetson Module | +GMSL | +Download Link | +
|---|---|---|---|
| 5 | +AGX Orin 32GB | +❌ | +Download | +
| AGX Orin 32GB | +✅ | +Download | +|
| AGX Orin 64GB | +❌ | +Download | +|
| AGX Orin 64GB | +✅ | +Download | +
 +
+ +
+
 +
+
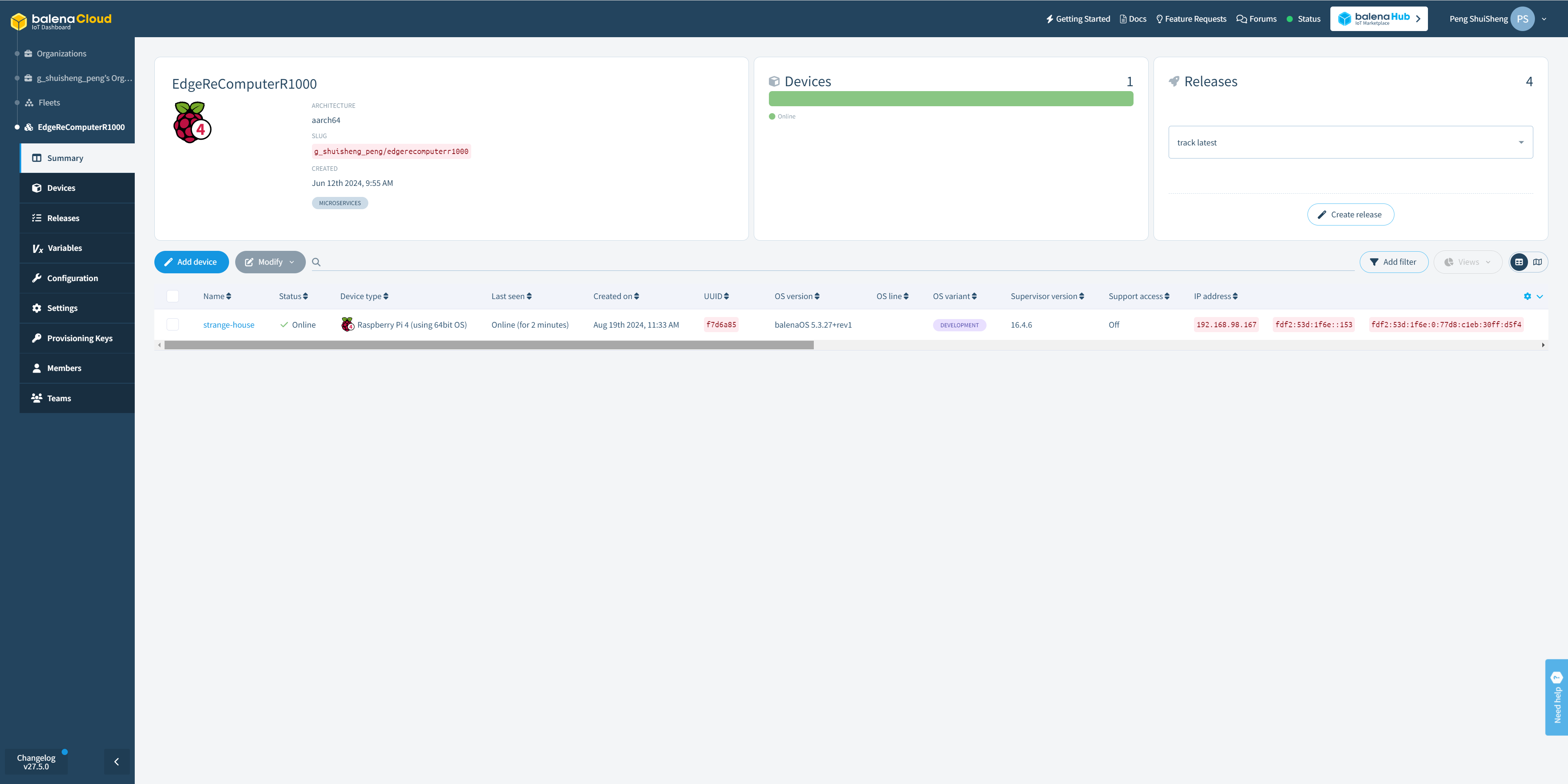
| reComputer R1000 | +
|---|
 |
+
| + |
 | Normal mode | Boot from eMMC | Low |
+|
| Normal mode | Boot from eMMC | Low |
+| 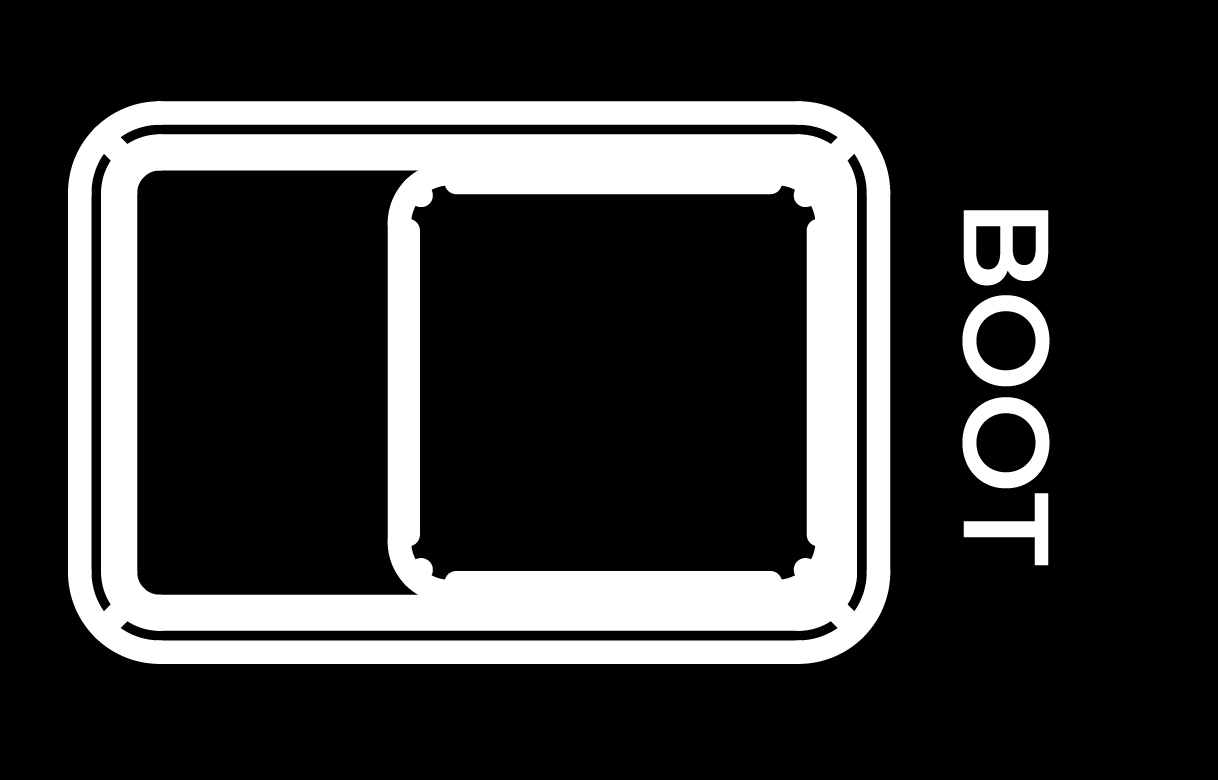 | Flash mode | Boot from USB | High |
+
+
| Flash mode | Boot from USB | High |
+
+



Range: -20 to 60℃;
Accuracy: ± 1℃ (min ±0.5℃, max ±1℃)
Resolution: 0.1℃
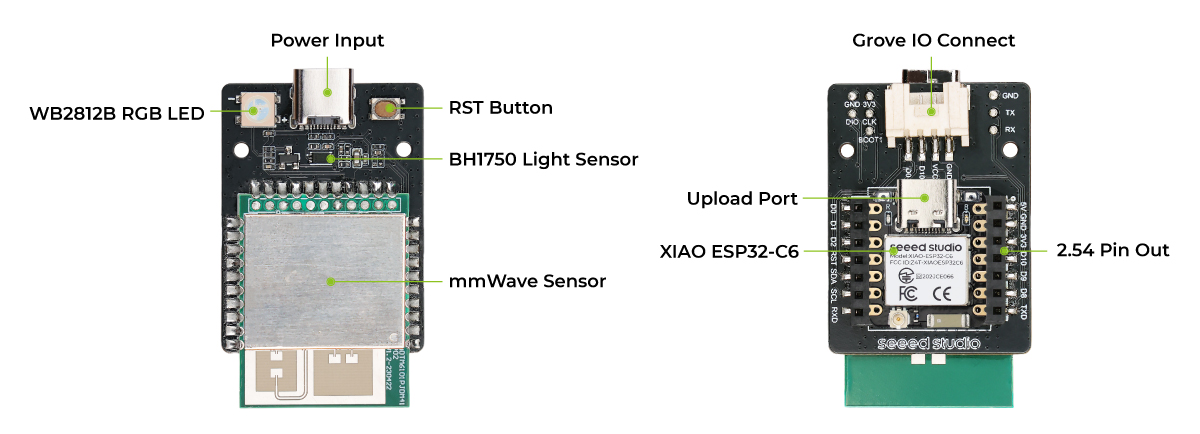
| |**Light**|0 to 100% (0% is dark, 100% is brightest)| -|**3-Axis Accelerometer**|3-Axis Accelerometer to detect movement| |**LED and Buzzer**|1\*LED and 1\* buzzer to indicate status| |**Button**|1\* Button to operate| |**Antenna**|Internal (GNSS/LoRa/Wi-Fi/BLE)| @@ -77,12 +76,38 @@ It is a high-performance tracker designed for Meshtastic, as small as a credit c |**Power Input Voltage**|4\.7 to 5.5V DC| |**Charging Temperature Limit**|0 to +45℃| - ### Hardware overview



| Seeed Studio XIAO R4M1 | +Seeed Studio Expansion Base for XIAO with Grove OLED | +Grove - Relay | +
|---|---|---|
 |
+  |
+  |
+
| + | + | + |

| Seeed Studio XIAO RA4M1 | +Seeed Studio Expansion Base for XIAO with Grove OLED | +Grove - Variable Color LED | +
|---|---|---|
|
+ |
+  |
+
| + | + | + |

| Seeed Studio XIAO RA4M1 | +Grove-Variable Color LED | +Grove-Rotary Angle Sensor | +Grove-Rotary Angle Sensor | +
|---|---|---|---|
|
+  |
+ |
+  |
+
| + | + | + | + |

| Seeed Studio XIAO RA4M1 | +Seeed Studio Expansion Base for XIAO with Grove OLED | +
|---|---|
|
+ |
+
| + | + |
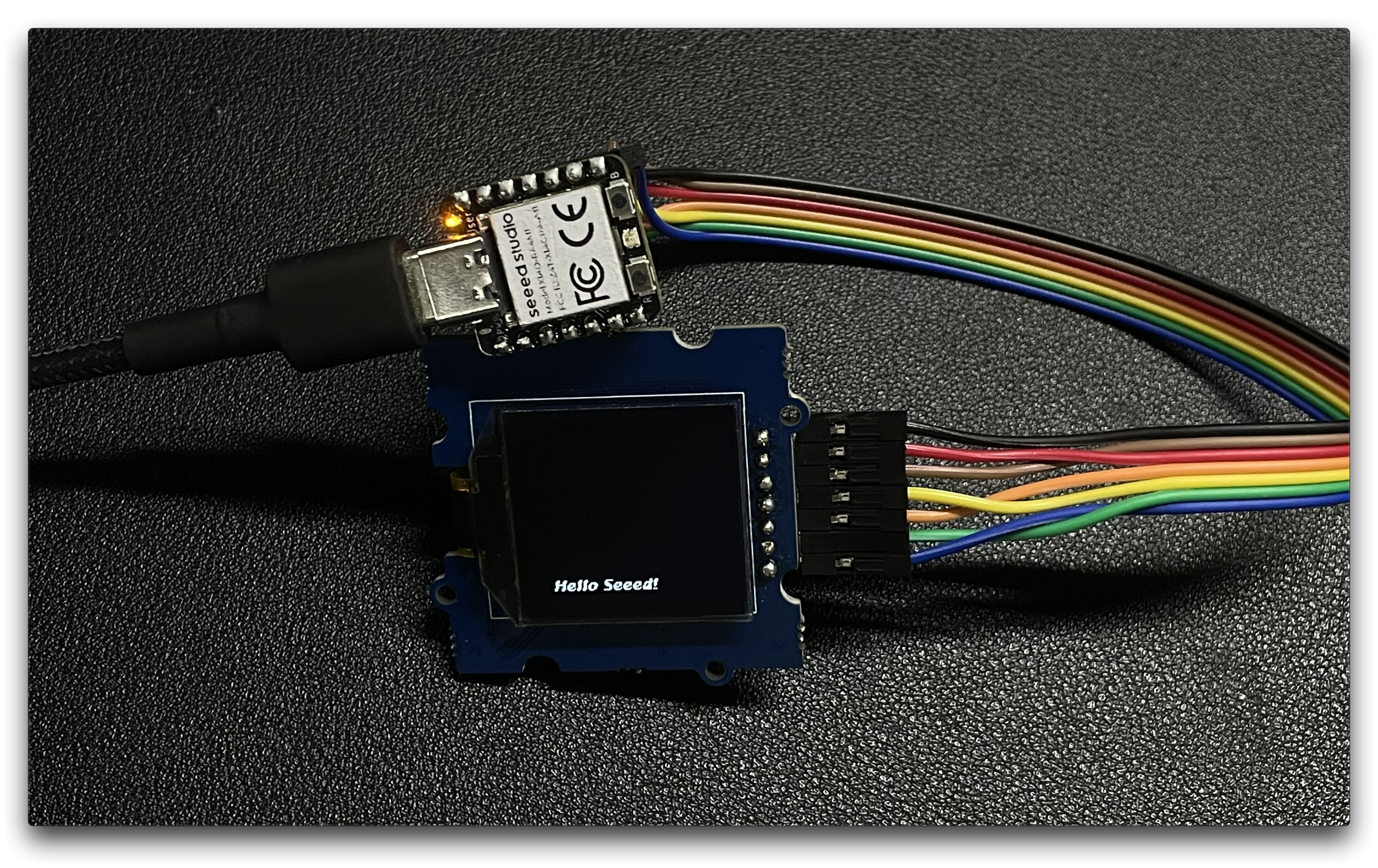
| Seeed Studio XIAO RA4M1 | +Grove - OLED Display 1.12 (SH1107) V3.0 - SPI/IIC | +
|---|---|
|
+ _V3.0/img/10402050_Main-02.png) |
+
| + | + |
| Seeed Studio XIAO RA4M1 | +XIAO CAN Bus Expansion Board | +
|---|---|
|
+  |
+
| + | + |

 +
+*_Rceciver Code Result_ *
+
+
+*_Rceciver Code Result_ *
+



















| SenseCAP Watcher | +Home Assistant Green | +
|---|---|
 |
+  |
+
| + | + |








{kind=link}