error E08 Synchronization loss fault #501
Comments
|
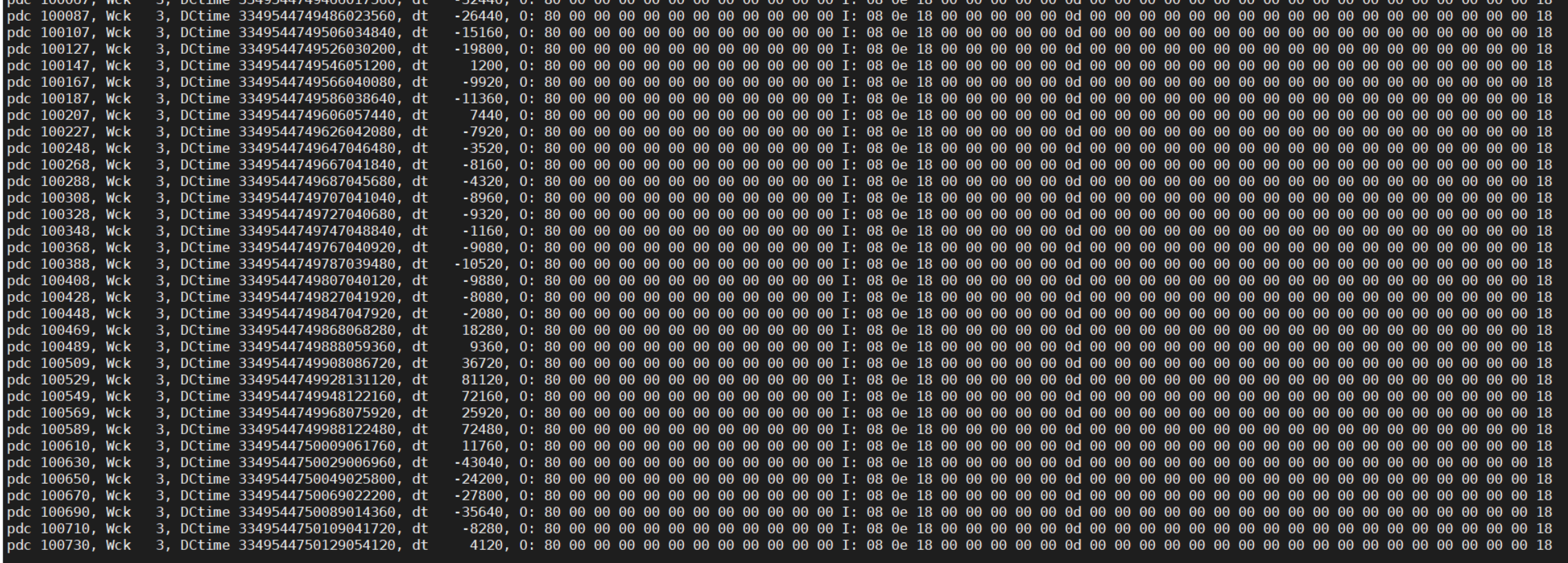
From the screen shot I can see that the DCtime jitter is quite a lot. You are running 200us cycle time and a visible jitter of 120us. This will indeed not work. Improve your timing. The ec_sync function you copied is not the best for high performance. Replace it with a PI controller and tune the gains appropriately. You want to have below 30us average deviation with peaks below 50us. This is not easy to do on most hardware and a standard OS. The first question here would be, do you need 200us cycle time? If you drop to 1000us the tolerances are more bearable. |
|
I am using 1000 us cycle time. I double checked all values and maybe the confusion is because of the 20 ms output/printf cycle time.
|
|
Ehh, brain fart from my side. Lack of coffee I guess. It shows the delta time between each LRW. According to your measurements the max. jitter is 63.8us. But from the sample above you can see packet no 12487 is 854.8us late. It does not happen often in your trace but there are more. Some servo slaves keep a simple counter for sync errors. When you reach the threshold it throws an error. It would have been better if they implemented it as a leaky integrator so it would forget old mishaps. But I guess you are unlucky with this slave. But the data you provided combined with the raw data provides some clues. Most likely your system is hit by SMI. |
|
Still working. Seems the servo has an old firmware. The factory will ship me the last version. |
|
After |
|
Well, assumed your code still looks like something in your first post I am not surprised it does not work. You can not simply dump the slave in OP then start-up sync-0 and hope for the best. Please read #487 (comment) |
|
Thanks. Is too complicated. I will do it with TwinCAT. |
|
I did it with TwinCAT, but I did it with SOEM too. The only change I did was to do it like below: |
Hi guys,
I am trying to make an Inovance IS620N to work, using redtest model, but after 2 weeks I am ending into
Er.E08 (Synchronization loss fault)
Attached is the C code, ESI file, and a Wireshark dump.
red2-202104081738.pcapng.gz
red2.c.txt
03024278-IS620N-Ecat_v2.6.8.xml.txt
Please help me with this issue,
Regards,
Gabriel
The text was updated successfully, but these errors were encountered: